ESP電子車身穩定系統模擬設計

2.2 模擬設計的電路原理圖
在汽車的實際行駛過程中,由于各種原因出現側滑或者轉向過度、躲避障礙物等突發情況,ESP電子車身穩定系統會主動感知到汽車行駛的不穩定狀態,電子控制單元通過對各個傳感器采集數據的分析和判斷,主動采取干預措施,防止發生意外事故。但在實際的測試中,由于實驗條件的差異性,無法模擬到真實汽車在遇險時的處理過程,主要是模擬小車在急速轉彎的情況下,實驗小車出現不穩定性行駛狀態,ESP電子車身穩定系統開始由待命狀態進入工作狀態。
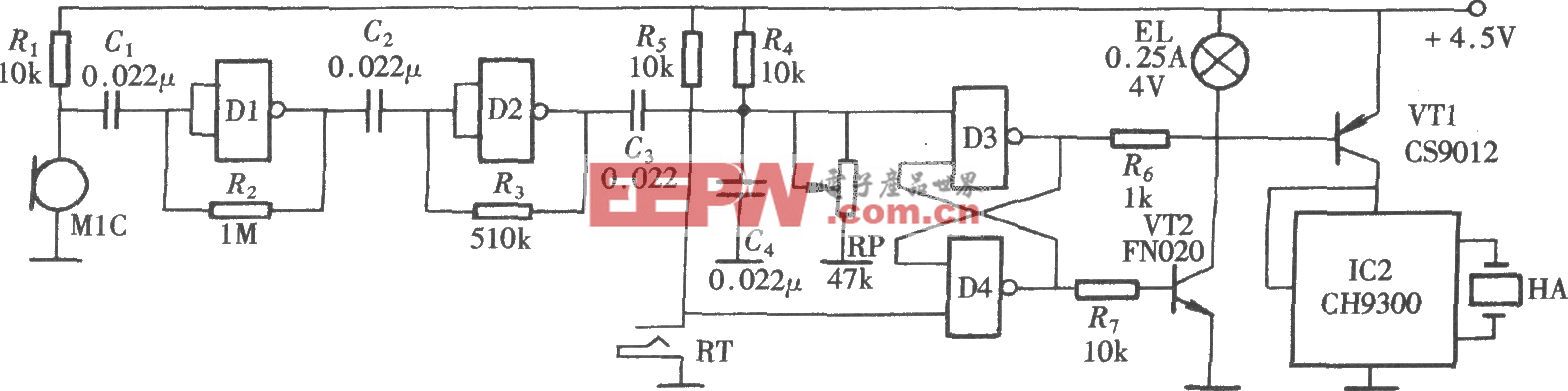
圖3是模擬處理采集信號的過程,依次對采集到的傳感器信號進行放大、比較處理,從而通過發光LED燈來判斷實驗小車的行駛狀態。本文引用地址:http://www.104case.com/article/196177.htm
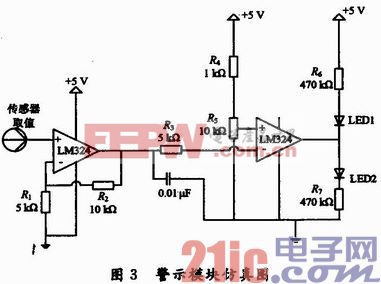
2.2.1 電壓放大模塊
在該設計的模塊中,由于實驗小車的本身的速度的局限性通過加速度傳感器采集到的電壓信號較弱,需要對電壓信號進行放大。主要采用芯片LM324對模擬信號進行放大,便于后面的電壓比較器處理。由于采用的加速度傳感器芯片的特殊性質,在0 g或者靜止的情況下,輸出模擬電壓大概為1.2 V,經過電壓放大模塊以后,電壓由原來的1.2 V放大到1.8 V左右。由圖3可以看出,采用同相比例電壓放大,由管腳1輸出來的電壓就是1.8 V,根據設計的原理圖,由反饋回路上的兩電阻比值得知,運算放大倍數為3倍,由于實際測試的時候LM324運算放大器采用3 V直流電源供電,所以同相比例放大器沒有按照理論上的3倍進行放大,而僅僅放大了1.5倍,經過放大的1.8 V的模擬電壓信號經過濾波電路,接入到比較器的6管腳,與設定的電壓值進行比較。
2.2.2 電壓比較器模塊
在電壓比較模塊中,選擇LM324芯片作為比較器,比較器正向輸入設定的電壓值,以此來模擬汽車在穩定行駛時的數據,實際小車測到的實驗數據接入比較器負向輸入。理想狀態下,當實際測得電壓值小于設定的電壓時,比較器邏輯出高電平,則根據電路原理圖可知,LED1不發光,而LED2發光,相反,如果實際測得電壓數據大于設定的理論值,則比較器邏輯出低電平,此時LED1燈發光而LED2燈不發光。通過LED的亮滅,來判斷此時小車是否是加速度過大,是否是穩定行駛的狀態。
在測試過程中,由于電壓比較器的供電電壓也是3 V的直流電源,所以模塊一經上電,LED1就會點亮,表示電路工作正常,模擬實際汽車行駛的安全狀態,此時ESP不工作;當加速度傳感器感應到危險狀態,輸出模擬電壓較大電壓時,實驗小車不在預定的狀態行駛,此時LED2點亮,而LED1熄滅,LED2燈點亮發出警告此時小車處于不穩定行駛狀態,同時也預示,汽車的ESP系統要從待命狀態進入工作狀態。在實際演示過程中,經過多次試驗,設定的電壓值為1.8 V是比較合適的。
2.3 實驗制動模塊的模擬設計
ESP電子車身穩定系統在工作時,當ECU接收到輪速傳感器傳來的信號時,電子控制單元就會下達相關指令到執行器一液壓調節器。液壓調節器通過控制各個車輪的制動回路,來主動調節汽車行駛的不穩定狀態,及時糾正汽車的行駛方向,使汽車主動回到預定的行駛軌道,保證行車安全。
2.3.1 制動模塊模擬設計的原理分析
考慮到實驗小車的驅動模塊已存在,無法對驅動模塊進行干涉,在模擬設計中,主要采用繼電器對小車的驅動后輪電機進行短暫的制動,繼電器主要起轉換電路的作用,通過三極管NPN9013的導通與截止,來控制繼電器工作,當繼電器工作時,繼電器線圈有電流通過,產生電磁力,吸引繼電器內部銜鐵轉換電路,切斷后輪電機的工作回路,電機停止工作;短暫的時間后,繼電器斷電,內部開關主動回到原來的位置,小車繼續工作。

電路圖符號相關文章:電路圖符號大全








評論