GPS接收機快速熱啟動的分析與設計

摘 要:針對GPS接收機上電開機后熱啟動問題,闡述一種新型的快速熱啟動方法。首先研究了衛星導航測距定位原理,在此基礎上深入分析接收機基帶信號處理鏈路。當處于衛星信號跟蹤狀態下,利用接收機實時時鐘單元RTC直接預測衛星發射時間,省去了通常耗時的子幀同步過程。此快速熱啟動策略,相比傳統方法,既滿足了定位速度要求,又具有較高時間準確度,熱啟動首次定位時間大為縮短。
關鍵詞:GPS接收機;熱啟動;偽距;首次定位時間
0 引 言
全球定位系統(Global Positioning System,GPS)經過數十年的應用開發,已具備了全天候、高精度、自動化、高效益等顯著特點,贏得了廣大用戶的信賴,已從最初的軍事應用,逐漸過渡到國民經濟基礎性產業的應用。在性能上,衛星導航用戶產品朝著快速定位、高靈敏度、高精度、小型化、低功耗、組合導航等方向發展。導航接收機的快速定位能力,主要由首次定位時間(Time To First Fix,TTFF)這項指標決定。提高首次定位時間這項性能,無論對于車載導航市場,還是導彈導航等軍事領域,都尤為重要。但是,由于這項技術在商用以及軍事應用的保密性和敏感性,國內一直無法獲得國外的相關成熟技術。因此,深入研究這項技術就顯得非常重要。
根據導航接收機開機上電時的不同實際情況,首次定位過程有冷啟動、溫啟動和熱啟動三種模式。冷啟動模式基本沒有可用信息,啟動過程在40 s左右;溫啟動和熱啟動模式,是分別利用衛星歷書和衛星星歷,明確當前用戶位置可見衛星號,進行定位。國外導航接收機知名公司如Sirf、U―Blox的導航產品,熱啟動在2~4 s;國內接收機目前熱啟動時間在9 s,快速定位技術和國外差距較大,還不成熟。現以接收機的熱啟動為例,在分析導航接收機的首次定位過程基礎上,提出新型快速熱啟動策略,提升50%~60%的熱啟動性能。
l 定位測距原理
GPS系統中,采用本地時間減去衛星信號發射時間,可以獲得單顆衛星的偽距。但是,衛星和接收機的時鐘偏差以及各種誤差源都會使衛星到用戶的幾何距離測量不準。誤差源包括大氣延遲、接收機噪聲、多徑等。由這些誤差引起的時間偏差為:
![]()
式中,δtatm為大氣層引起的延遲;δtnoise為接收機噪聲和分辨率偏差;δtmp為多徑偏差;δthw為接收機硬件偏差;δtSA為GPS選擇可用性(SA)偏差。
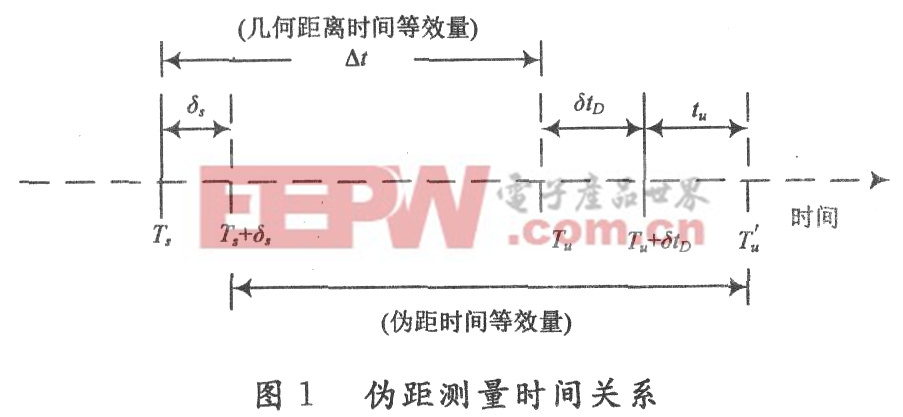
這樣,如圖1所示,包含了各種誤差的偽距計算式:

式中,△t為幾何距離時間等效值;Ts為信號離開衛星系統時;Tu為無δtD的條件下,信號到達接收機的系統時(理論上的精確值);Tu+tu=無δtD的條件下,信號到達接收機時的接收機RTC(Real Time Clock)時鐘讀數;T’u=Ti+δtD+tu為有δtD的條件下,信號到達接收機時的接收機RTC時鐘讀數;δs為衛星時鐘與系統時的偏差;tu為接收機時鐘與系統時的偏差;T’s=Ts+δs為信號離開衛星時的衛星時鐘讀數;c為光速;r=c*(Tu一Ts)。
經過衛星時鐘偏差校正、大氣延遲校正后,得到了修正過后的偽距ρ’:
![]()
如果此時能夠獲得至少4顆衛星的修正偽距,同時根據衛星發射時間Ts計算出相應衛星坐標,則可以通過最小二乘法計算出接收機的準確位置。
2 快速熱啟動算法的設計
2.1 熱啟動首次定位過程分析
由上一節的分析可以看出,本地時間可以由接收機RTC單元提供,屬于已知量。那么,計算偽距的關鍵在于獲得準確的衛星發射時間,也就是式(2)所討論的。本小節結合圖2,分析GPS接收機信號處理流程中如何獲得衛星發射時間。
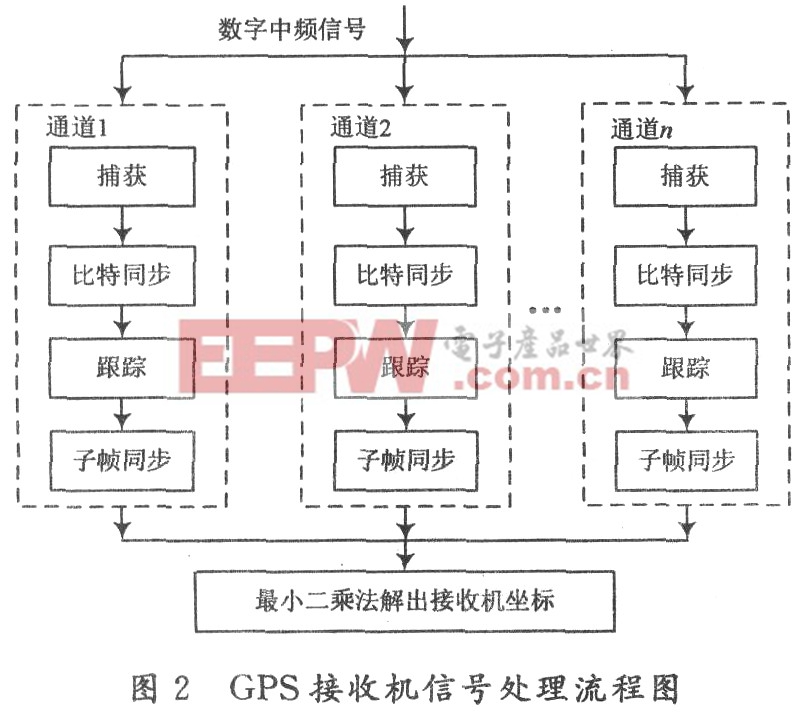
每顆GPS衛星廣播兩種類型的PRN測距碼:一種是C/A碼,另一種是P碼。本文以C/A碼為例進行分析和研究。C/A碼有1 ms的周期,1 023個值為+1或一1的碼恒定地重復,碼的編號為1~1 023。GPS導航電文按子幀播發,每子幀共300 b的數據,每比特數據周期20 ms,C/A碼在此20 ms內重復20次。
跟蹤狀態下,本地復現碼對接收到的C/A碼進行“跟蹤”。從圖2可以看出,跟蹤衛星信號之前,先完成了比特同步,即20 ms數據邊界的判定。那么進入信號跟蹤以后,接收機本地復現碼與衛星發射碼精確對準。此時,可以認為衛星發射時刻T’s,由20 ms以內部分tfraction_20和20 ms以上整數部分tinteger_20。而tfraction_20通過跟蹤已經獲得,只是tinteger_20還屬于未知量。此時:

2.2 快速熱啟動策略
如何獲得tinteger_20,決定了傳統熱啟動方法和快速熱啟動方法的不同。熱啟動條件下,傳統方法是在完成子幀校驗后,得到finteger_20;而快速熱啟動方法是在跟蹤狀態,使用本地RTC,基于接收機和衛星距離,判定tinteger_20。第一種方法,由于需要等待子幀校驗,最長耗費一個子幀的周期6 s時間才能完成;第二種方法,由于使用本地RTC,不需要等待子幀同步,那么在熱啟動時間上就可以節省6 s的時間,進行快速定位。
假設進入跟蹤以后的RTC讀出的本地時刻T'u=Tu+tu+δtD,式中參量含義見式(1),tu為接收機RTC時鐘單元與系統時的偏差,10 ms。由于tu非常小,可以根據T'u估計出衛星i坐標(xi0,yi0,zi0)。這樣可以估算出衛星i到接收機的幾何距離:

所以,衛星的發射時刻T'si△T'u―ρi/c,i代表了衛星號。結合T'si的近似值和已知的tfraction_20,求解T'si和tu:

式(7)中,ceil表示對浮點數朝+∞方向取整的函數。獲得了衛星發射時間T'si,可以按照式(2)計算出衛星i到接收機的偽距。這時基于星歷,重新計算衛星發射時刻Tsi的衛星坐標(xi,yi,zi)。基于上述過程,當獲得了4顆以上衛星坐標和各衛星到接收機的偽距后,可以開始結算出接收機坐標。
3 快速熱啟動的失效檢測機制
由上一節可以看出,使用本文設計的方案前提條件就是本地時間與系統時的偏差tu10 ms。如果接收機熱啟動時,不能滿足快速熱啟動的前提,那么該方案的有效性就無從談起。所以采用快速熱啟動方案,必須配以相應的失效檢測機制,如圖3所示。

4 結語
本文對GPS接收機熱啟動首次定位過程進行了研究,著重分析了本文設計的新型快速熱啟動算法。基于快速熱啟動原理,熱啟動首次定位時間將能提高5~6 s,相比傳統的熱啟動性能(9 s左右),提高了50%~60%。隨著新一代GNSS(Global NavigationSatellite System)的不斷建設壯大,融合GPS,GLONASS,GALILEO和北斗導航定位系統的接收機將成為市場和研究的熱點,快速熱啟動算法在衛星導航系統融合時代的應用,還需要進一步的研究。










評論