基于紅外多目標圖像序列的自動判讀技術

摘 要:提出了一種紅外多目標圖像序列的自動判讀方法,先著重闡述一種目標序列段自動變步長搜索方法精確定位有用目標序列段,然后對圖像二值化分割批處理方法以及判讀脫靶量計算等關鍵性技術進行說明,最后輸出準實時脫靶量;探討目標搜索中步長和信號量閾值對搜索時長以及精度的影響。實驗結果表明,對于低SNR的紅外弱小多目標圖像序列,該判讀方法能縮短判讀時間,提高判讀的準確性。
關鍵詞:自動判讀;自動變步長搜索;脫靶量;圖像處理
0 引 言
視頻記錄與判讀系統是靶場紅外測量設備的重要組成部分,用來實時記錄目標視頻圖像并完成對測量目標的定位和判讀。在靶場測量中,準確地提取圖像中弱小多目標的脫靶量對于交匯計算目標的彈道和落點等信息起決定作用。隨著現代科技的進步,對靶場數據處理的效率提出了更高要求,數據量更大,處理速度更快,測量更精確。對于大數據量的紅外多目標圖像序列,運用合適的方法在圖像序列中自動快速找到含有目標的圖像序列段并對其進行判讀是重點和難點。因此,研究紅外圖像多目標段序列的自動判讀技術具有重大意義。在此,研究的目的是實現對目標序列段的準確定位以及測量結果的自動判讀,對于紅外弱小多目標的檢測,單幀檢測很難實現,必須基于目標灰度與鄰域的差異為出發點,充分利用多幀圖像序列的相關信息,比如運動軌跡的連續性、一致性等。根據實際要求,先提出目標序列段自動變步長搜索方法,在大量圖像數據中自動搜索有用目標段,然后對目標序列段進行判讀。實驗結果表明,該技術在很大程度上了提高判讀的精度和實時性。
1 基本原理
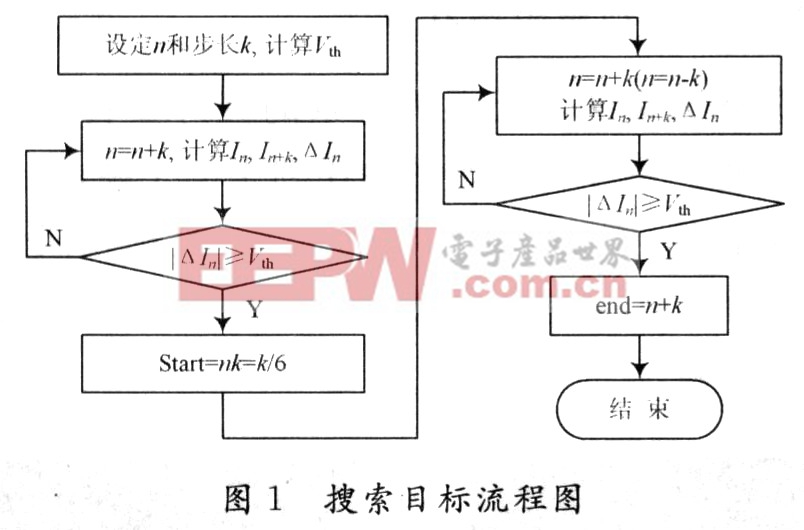
1.1 目標序列段自動變步長搜索
由于圖像采集時探測器為凝視狀態,在天空背景下云層的移動是緩變的,而目標的運動速度比較快,相對于高速記錄的圖像可以視為靜止,因此在目標出現前后可以認為背景是靜止不動的。將含有目標圖像與背景圖像相減即可將背景去除,累加目標進入視場前的相連M幀圖像f(x,y),再求算術平均值。設包含目標的紅外場景圖像f’(x,y)為:
![]()
其中B(x,y)為背景圖像;f(x,y)為目標圖像;N(x,y)為噪聲圖像。
對目標進入視場前有f(x,y)=0,即:
![]()
累加目標進入視場前的相連M幀圖像f’(x,y),再求算術平均值,即得到平均背景g(x,y)。

這樣可使噪聲方差由原來的σ2降為1/Mσ2,均方差降為原來的剩下的圖像只含有目標和能量減少后的噪聲,其信息量為目標和噪聲所占的像元數目。統計圖像序列的信息量,發現目標開始進入視場時,信號量明顯增加,離開視場時明顯減少,目標在視場內時信號量起伏不大。由此現象,可以通過計算相鄰步長幀之間信息量增量來判斷并確定目標進入和離開視場的時刻,從而搜索到有用目標序列段。
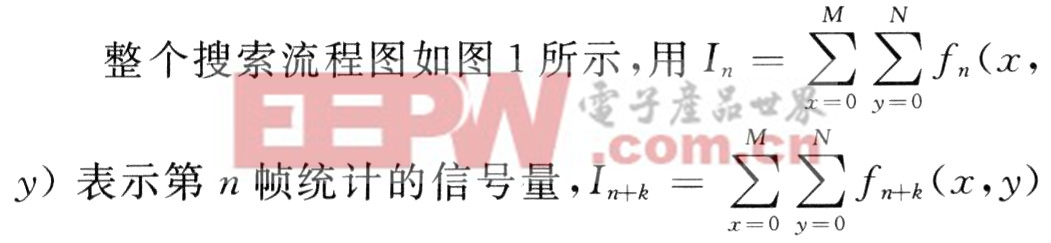
為第n+k幀統計的信號量。搜索步長為k(k≤設定的目標個數),則:△In=In+k一In為前后兩幅圖像信號增量。取閾值Vth=O.4α+Lβ,式中L為權值,與圖像的噪聲情況相關,一般取值0.3~0.5。α,β分別為噪聲的信號量和目標的信號量,α為設定的目標個數乘以理論計算的目標所占像元,β為連續10幀噪聲圖像的信號量的均值。則當|△In|≥Vth令第n幀為有用的信息圖像序列的起始幀;當|△In|Vth則令第n+k幀為有用的信息圖像序列的結束幀。第一步搜索結束后,減小搜索步長,通常取值為(1/6)k~(1/8)k,選擇某一中間幀,分別向前向后進行搜索,最終精確定位目標起始幀和結束幀。


評論