超聲層析成像檢測系統的研究與實現

4 圖像重建算法
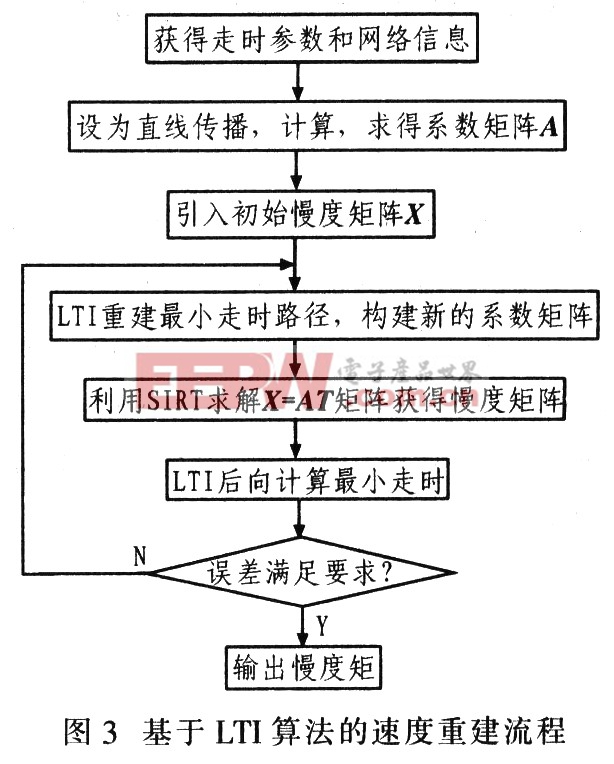
實現超聲層析成像有正演和反演兩個基本過程。正演是反演的基礎,其模型選取與求解精度直接影響反演變精度;而反演過程實際是對問題的最優化過程。反演方法一般分為變換重建法和級數展開法兩大類。由于級數展開法通過離散重建區域,降低原有問題的非線性,適合投影數據不夠精確、不能完全且以射線為曲線的層析成像。根據反演的理論基礎,層析成像分為以射線理論為基礎的射線層析和以波動理論為基礎的波動層析。目前CT技術從直射層析成像向彎曲射線層析成像發展。反演方法由最小二乘法發展到各種約束條件下的加權阻尼最小二乘法以及統計法,如最大熵法。觀測參數由單一走時數據向多參數數據發展。反演方法則從線性(代數重建法、聯合跌代重建法等方法)向非線性(梯隊法、模糊神經網絡算法和遺傳算法等方法)方向發展。射線追蹤是確定波從激發點傳至接收點的射線路徑及其走時的主要技術。因為層析面上各點的波速不相等,波傳播的路徑是一個與材料不均勻性相關的曲線,其真實路徑未知,所以可采用射線追蹤理論求取其真實路徑。而射線追蹤算法分為向前處理與向后處理兩部分。
(1)向前處理先計算離散網格模型上所有邊界點的最小走時,然后計算發射點單元所在列各單元邊界上所有離散點的最小走時。并記錄對應的次級源,接著對發射點單元所在行各單元邊界上所有點的計算與第二步相同。在求出每網格內局部走時的基礎上,對發射源發出的射線在整個模型上的走時相加便得到全局最小走時。
(2)向后處理根據向前處理中得到的各單元邊界上所有計算點的最小走時及相應次級源,追蹤所有發射點到接收點間具有最小走時的射線路徑。首先求出接收點所在單元邊界上走時最小的離散點,以走時最小的離散點為新的接收點,重復上一步驟向前推,直到發射點所在單元為止。將發射點與最后的射線交點相連。即完成全部向后處理。本文引用地址:http://www.104case.com/article/195616.htm
5 層析結果
圖4為假設模型的網格分布圖,其背景區域的速度為v0=4.000 m/s,異常區(即黑色區域)速度為v1=3 000 m/s。探頭布置采用環繞方式,利用線性插值射線追蹤算法和聯合迭代重建算法得到速度層析圖像,結果如圖5所示,從圖5中可清晰發現低速區。因此,解決了圖像檢測中圖像清晰度不高的困擾。此設計方案可運用到各種需要利用超聲波圖像檢測的領域。

6 結論
本文所采用的陣列檢測方法,在射線追蹤算法和SIRT重建方法的基礎上,所提取的走時數和超聲波數目大大增加,這樣在相同的迭代次數條件下,得到結果更精確,重建圖像結果更清晰準確。


評論