基于P89V51RD2的功率因數測量儀設計

由于電力系統中工頻周期為20 ms,因此,電壓與電流的相位差測量精度取決于相位差信號的高電平寬度的測量。相位差為φ的電壓和電流信號Ui和Ii分別經電壓轉換器和低通濾波器。再經相應過零比較器變成方波,最后經相位-時間轉換電路得到與相位成比例的高電平方波。圖2給出圖1中各節點的信號波形。
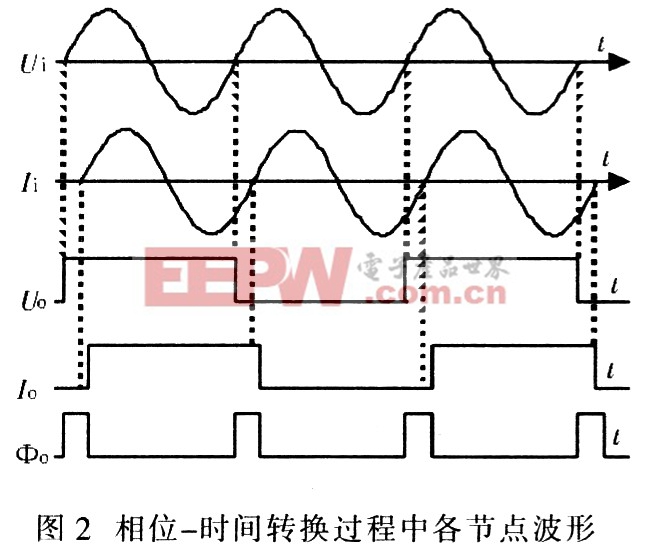
相位-時間轉換法所得φo與實際相位有一定的相位差,這是由低通濾波器引起的,可通過軟件進行補償。φo信號是由單片機定時器定時計數高電平而測量的,其相位差φ為:
式中,△t為高電平寬度。
由于P89V51RD2單片機振蕩頻率采用24 MHz,因此△t的測量分辨率可達0.5μs,因此相位精度可達0.018°,具有較高的相位測量精度。
余弦值的計算采用查表和小數補償算法。首先對計算出的相位整數度查表,求得當前值和下一整數值的余弦值;然后,計算小數部分余弦值的增量值為兩整數余弦值之差乘以小數部分,最后,將當前值的整數相位余弦值加上小數值進行校正補償。這樣就可得到精度較高的功率因數。
3 系統硬件結構及其工作原理
圖3為基于P89V51RD2單片機的功率因數測量儀電路原理圖,該測量儀由信號預處理電路、相位檢測電路、電源、顯示和單片機小系統等模塊組成。圖3中的Ui、Ii、Uo、Io和φo各節點與圖1中的各點相對應。


評論