微型測距雷達的原理及組成

1.1 測距方法
通常雷達測距的方法有三種:脈沖法測距;調頻連續波法測距;相位法測距。常用的為前兩種。脈沖法測距分辨率要達到距離精度1 m以下,脈沖寬度必須小于6.67 ns,即使當今脈沖雷達普遍采用脈沖壓縮的情況下,精度要做到厘米級是相當困難的,何況是以增大接收機帶寬,降低接收靈敏度為代價,電路上也難以實現。因而對于較精確的距離測量,一般都采用調頻連續波測距的方法。
調頻連續波測距有三角波調制和正弦波調制兩種,這里選擇三角波調制。
在三角波調制中,測距公式為:
式中:R為距離;c為光速;
為三角波正向發射頻率與接收頻率之差,fb-為三角波負向發射頻率與接收頻率之差;f為三角波調制頻率;△fm為受調制的發射頻率最大頻偏的二分之一。
三角波調制頻率的選擇與距離分辨率有關。假如選擇f=200 Hz,△fm=100 MHz,而此時測出的頻率fbav為50 kHz,則可以計算出R≈ 93.750 0 m;如果測出的頻率fbav=50.001 kHz,R=93.751 8 m,二者之差為1.8 mm,即每1 Hz代表1.8 mm的距離。提高調制頻率f的值,分辨率還可以增加。假如f=1 000 Hz,其他參數不變,同樣測出的頻率fbav=50 kHz,R=18.750 O m;fbav=50.001 kHz,R=18.750 4 m,相差0.4 mm,每1 Hz代表O.4 mm的距離。
如果是運動目標,根據測速公式:
求出運動目標的速度。式中V為目標的徑向速度,λ為發射微波的波長。當然,固定目標的fb+與fb-的值相等。
1.2 組成
根據三角波調制的雷達原理,首先必須有一個微波頭,微波頭可在測速微波頭的基礎上,將體效應振蕩器加一個變容管改為壓控式振蕩,直接混頻。同時還需要一個三角波發生器。為了修正壓控振蕩器的非線性,使之頻率線性變化,必須進行非線性修正。
為了增強效果,可采用模擬濾波器組進行積累處理。當然也可以通過高速A/D采樣后將模擬信號變為數字信號用DSP進行數字信號處理,不過成本較高。
和工控機、PC104模塊相比,采用單片機控制電路比較簡單,且成本較低,由于沒有復雜的運算,速度完全能夠滿足要求。
這個設計功耗較小,用電池就可滿足電源供給要求。
微型測距雷達的組成框圖如圖1所示。
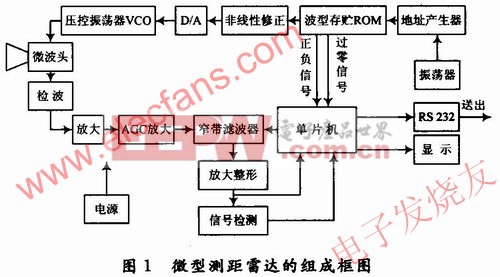
1.3 工作原理
三角波調制頻率選200 Hz,D/A選擇12位,ROM為16位數據輸出,12位數據作為D/A的輸入;一位作為三角波正斜率和負斜率變化時的脈沖輸出,正斜率為“1”,負斜率為“0”;另一位作為一個三角波周期間的過零信號,送單片機的中斷INT0,當三角波正負斜率變化時,輸出脈沖信號。單片機產生過零中斷后,判斷正負信號,為“1”,得到的是fb+;為“O”,得到的是fb-。
雷達工作時,單片機控制窄帶濾波器不斷的進行掃描,當某一個濾波器有信號時,由可重觸發單穩態電路組成的信號檢測電路輸出由“0”變為“1”,單片機根據輸出的窄帶濾波器獲得帶內頻率,判斷出精度不太高的距離范圍,利用放大整形輸出進行計數或測量脈沖的周期,獲得足夠精確的頻率值,即為準確距離。根據公式計算出R和V送顯示器予以顯示,或通過RS 232串口送上一級的計算機系統。
2 各部分的組成
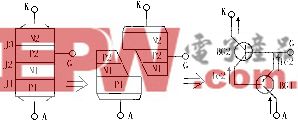
2.1 微波頭
微波頭包括喇叭天線、體效應振蕩器、環行器、混頻器。體效應振蕩器產生發射微波,喇叭天線作為微波對外收發之用,環行器將收發進行隔離,混頻器取出發射頻率和接收頻率的差值。微波頭國外常用的有24 GHz,35 GHz和77 GHz,可采用Wisewave公司的產品。其功率輸出為+10 dBm,頻偏DC為100 MHz,波束寬度120,園極化。






評論