基于CAN 總線的電動機保護裝置的設計

摘要: 對三相異步電動機保護系統的硬件及軟件實現進行了研究, 以Freescale DSP 56F807 微處理器為控制核心,配以CAN 總線、液晶顯示以及采樣等其他功能模塊。而現場總線技術把專用微處理器置于測量控制設備中, 把單個分散的測量控制設備變成網絡節點, 將其連接成可以相互溝通信息、共同完成控制任務的網絡系統。在算法上由于DSP 有強大的數據處理能力,對瞬時電壓、電流和負序電流的幅值進行精確的計算而不需考慮時間的問題, 用軟件計算的方法替代硬件邏輯, 減少硬件資源的浪費。
本文引用地址:http://www.104case.com/article/195039.htm電動機是各行各業應用最為廣泛的動力設備, 但由于在使用過程中保護力度不夠, 經常出現以下問題: 裝置功效低下, 保護裝置經常出現拒動從而使電動機燒毀, 由于誤動而跳閘。近年來, 隨著計算機技術、自動控制理論以及信號處理理論的不斷發展, 出現了以微處理器為核心、將繼電保護與計算機技術相結合形成的微機繼電保護裝置。
1 系統硬件設計
系統采用雙CPU 結構, 設計并實現了一套由數字信號處理器56F807 加單片機W78E516 構成的微機保護測控裝置。FREESCALE 數字信號處理器56F807 ( 此后簡稱為56F807 ) 作為主芯片完成信號采集、信號處理、保護和通訊等功能。該芯片具有A/D 轉換、開入和開出回路以及串行通訊口等功能, 信號輸入電壓為0 V~3 V, 轉換速度最快為每次同時掃描需要5.3 μs, 采集的路數、位數和速率完全滿*流采樣的要求。單片機W78E516 完成人機接口的所有功能。兩個模塊之間采用基于MODBUS 協議的RS -485 總線進行實時通訊。這種雙CPU 結構具有并行工作、分工合作的優點, 既保證了繼電保護的速動性、選擇性、靈敏性和可靠性, 又實現了實時測量的高精度。通過CAN 總線實現遠程的實時監控與調試。因此, 用戶可以根據現場網絡靈活選用通訊接口方式。這樣真正實現了電動機的智能保護、集中監控和管理。該系統硬件框圖見圖1。按其功能分為兩大模塊: 由數據采集模塊、開入開出模塊、EEPROM 模塊和DSP 56F807 組成的保護模塊; 由CAN 總線和通過RS-485 總線連接的顯示電路組成的監控模塊。
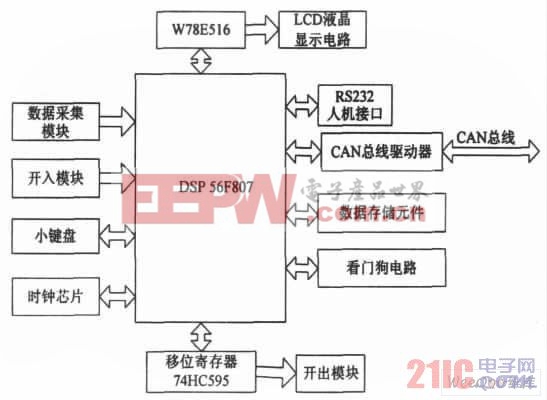
圖1 系統硬件框圖
1.1 保護模塊功能
保護模塊的主要功能是完成數據的采集、處理、計算、保護邏輯判斷和出口邏輯判斷及動作。硬件電路圖如圖2 所示。
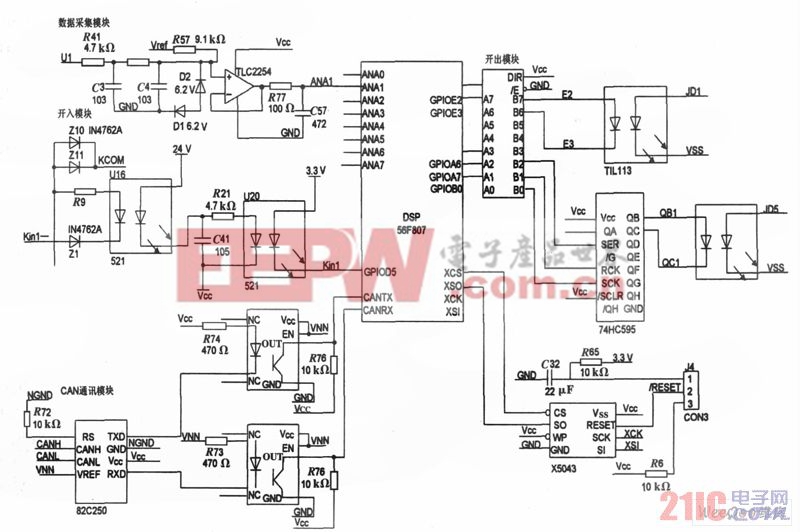
圖2 系統硬件連接圖

電動機相關文章:電動機工作原理設計









評論