基于P87C591的CAN總線超聲測距系統設計方案

介紹一種以Philips公司的P87C591作為超聲波傳感器控制核心及CAN總線控制器,以TJA1040作為CAN總線收發器的CAN總線智能超聲波測距系統;詳細介紹其硬件電路構成、工作原理及軟件設計思想。該系統硬件結構簡單,實用性強。
本文引用地址:http://www.104case.com/article/194958.htm關鍵詞 超聲波測距 CAN總線 P87C591 TJA1040 LM386 CX20106A
引言
移動機器人的安全避障問題一直是該項研究的基本問題,目前解決此問題的基本方法是采用多路超聲波傳感器通過適當的安裝角度達到獲取多路測量信息的目的。對于多路超聲波傳感器的擴展,一般是在機器人系統控制核心之上進行。這樣做的缺點在于,超聲波傳感器的擴展占用了大量的系統硬件資源,另外大量的測量信息的處理也浪費了系統軟件資源。針對這一問題,筆者采用CAN總線擴展多路超聲波傳感器的作法。這種作法有幾個優點: 首先,CAN總線具有良好的傳輸防錯設計,保證了數據通信的可靠性;其次,多路超聲波傳感器的設計可由CAN總線智能節點實現,大大節省了系統硬件資源和軟件資源;第三,由于CAN總線對于網絡內的節點數在理論上不受限制,所以隨著對移動機器人研究的不斷深入,對于整個機器人系統的總體設計可以靈活地在CAN總線上進一步開發。本文介紹的CAN總線智能節點的設計以Philips公司的P87C591作為超聲波傳感器的控制核心。由于P87C591具有片上自帶的CAN控制器并且為CAN的應用提供了許多專用的硬件功能,因此又將它作為了系統的CAN總線控制器,大大節省了主控系統的資源。CAN總線的收發器采用TJA1040。系統總體結構框圖如圖1所示。
機器人系統控制核心由ARM實現。其主要功能是處理需要復雜計算的信息,將經過處理的信息再送回CAN總線,并對整個網絡進行管理。超聲波智能節點控制系統的主要功能就是判斷障礙物位置,將對移動機器人前進方向有阻礙的障礙物信息通過CAN總線傳回主控系統,由主控系統作出相應處理并進行避障動作。本文將著重介紹超聲波智能節點控制系統。

圖1 系統總體結構框圖
1 超聲波智能節點控制系統的硬件設計
超聲波智能節點控制系統的硬件電路如圖2所示。P87C591是51系列單片機,對于大部分熟悉51單片機的使用者來說它的使用方法十分簡單。下面分別介紹各個組成部分。

圖2 超聲波智能節點控制系統
1.1 控制部分
超聲波傳感器的控制部分采用Philips半導體公司生產的P87C591。它是一個單片8位高性能微控制器,具有片內CAN控制器,是從80C51微控制器家族派生出來的。它采用了強大的80C51指令集,并成功地包括了Philips半導體公司SJA1000 CAN控制器的PeliCAN功能;全靜態內核提供了擴展的節電方式;振蕩器可停止和恢復而不會丟失數據;改進的1∶1內部時鐘預分頻器在12 MHz外部時鐘速率時,實現500 ns指令周期;內部具有的16 KB內部程序存儲器完全滿足本系統要求。
作為系統控制核心,P87C591擔負兩個主要任務。其一是作為超聲波傳感器的控制核心,在其普通I/O口上擴展了超聲波傳感器的接收和發射部分電路,利用單片機軟件功能產生40 kHz信號并通過驅動放大發射出去,再利用接收部分電路進行接收。另外可以對其余口線繼續進行超聲波傳感器的擴展,實現多個超聲波傳感器系統的設計。其二是利用P87C591的片內CAN控制器實現與CAN總線的連接。這樣的設計改變了過去在機器人控制核心上進行超聲波測距系統的設計,不但將超聲波檢測與處理的工作轉移到了單片機上,大大節省了機器人控制核心的系統資源,還將CAN總線智能節點的大部分控制工作也轉移到了單片機上,節省了硬件資源,同時CAN總線的采用大大提升了系統的抗干擾能力,使機器人控制系統更加穩定地工作。
1.2 超聲波傳感器發射部分
超聲波傳感器發射部分硬件電路如圖3所示。
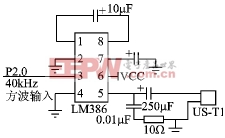
圖3 超聲波傳感器發射部分











評論