工業CT用駐波電子直線加速器測試系統的研制


上位機不能直接對加速器施加控制信號,需要將控制信號值傳入控制器,通過控制器進行相應處理后,再對加速器進行控制。本測試系統采用RS-232進行通信(長距離通信可改用RS-422協議)。
3 控制器
加速器的急停、電源、開機等功能直接通過航空插頭接在控制器上實現,通過控制器上的相關按鈕即可控制加速器的低預熱過程、高預熱過程、是否出束、是否截斷加速器電源等功能。另外,加速器的“使能控制”、“同步信號”等時序控制需要由控制器經計算處理后對加速器進行控制。
3.1 控制器硬件設計
根據測試系統設計的需要,控制器應設計與上位機通信的接口、參數模式及數值輸入接口、顯示接口。考慮到抗干擾設計的需要,確定控制器硬件電路由以下5個模塊構成:通信模塊、顯示模塊、控制模塊、光隔離模塊及按鍵處理模塊。下面介紹控制模塊和光隔離模塊的設計。
(1)控制模塊:基于對單片機性能與價格以及控制柜系統對于單片機要求的考慮,選用AT89C52芯片。設計優點:單片機價格便宜,所需功能都能實現,性價比高。設計缺點:單片機為串行處理,不能很好地滿足對執行效率要求較高的系統。
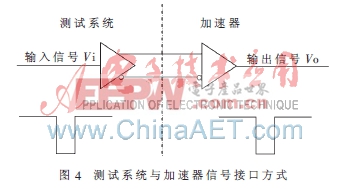
(2)光隔離模塊:控制側接口電源采用獨立5 V電源,控制柜和加速器之間的信號采用速度為1Mb/s的光耦合差分器件6N136進行連接;采用5 V的26LS32器件完成差分信號形式的輸入/輸出。如圖4所示。
3.2 控制器軟件設計
采用C語言進行控制器軟件程序的編寫,它移植性好,在擴充系統時可以很快移植運行于UNIX操作系統。主要由主程序模塊、LCD顯示模塊、串口模塊、按鍵處理模塊及波形發生模塊組成。
主程序控制系統主要功能,單片機各部分的功能都在相應子程序中實現。為保證數據傳輸的實時性以及不影響控制器其他部分程序的運行,串口以及波形發生均采用中斷方式實現。
3.3 頻率值誤差分析及校正
本系統用定時器0實現方波的定時時間。由于使用的單片機晶振是11.059 2 MHz,根據定時器0計數參數的計算公式:initial_value=t/MC。其中t為欲定時時間,t=T/2=1/(2×freq);MC為89C52的機器周期,即MC=12/11.059 2,故initial_value=t/MC=460 800/freq。由此得出定時器0的計數初值:
TH0=(65536-initial_value)/256
TL0=(65536-initial_value)%256
由于單片機晶振為11.059 2 MHz,故實際的頻率值與理論值存在誤差。
加速器對于頻率值的要求比較高,在輸入頻率值50 Hz~250 Hz變化的范圍內,要求在50 Hz、100 Hz、150 Hz、200 Hz、250 Hz的頻率值時,誤差范圍在0.5%以內,其余頻率值時,誤差范圍在2%以內。為滿足上述要求,當頻率值是10的倍數時,根據讀取的頻率值,通過不斷糾正,直接給出initial_value的值,而不是通過公式算出的initial_value值。其他范圍內的值,通過臨近范圍內特殊頻率值的initial_value值乘上頻率值給出M的粗略值。其中,M的值要小于理論值460 800。
此方法計算出來的頻率值精度較高,能較好地滿足加速器對于頻率值精度要求高的設計要求。
本工業CT用駐波電子直線加速器測試系統具有模塊化的特點,可根據實用需求進行性能擴展;實現了分項系統的質量監控的操作。由于采用了光隔離模塊,使控制柜能夠在工業環境中正常運行,增強了系統的穩定性。另外,系統中通過對頻率誤差進行補償設計,滿足了加速器正常工作的需求。系統已試用于9MeV駐波電子直線加速器工業CT機中,運行情況穩定可靠。
參考文獻
[1] 曾自強,張立峰.10Mev輻照電子直線加速器控制系統[J]. 原子能科學技術,2005,39(2):114-117.
[2] 張朝宗,郭志平.工業CT技術和原理[M].北京:科學出版社,2009.
[3] 陳雪星,劉宏邦.基于89C52單片機的多功能數據采集器[J].核電子學與探測技術,2008,28(5):1045-1047.
[4] 鄭莉,董淵,張瑞豐.C++語言程序設計[M].北京:清華大學出版社,2005.
[5] 何立民.MCS-51系列單片機應用系統設計系統配置與接口技術[M].北京:航空航天大學出版社,1990:407-
408.
[6] 呂衛星,高振江.電子直線加速器計算機控制系統的研制[J].原子能科學技術,2002,36(2):97-99.





評論