警用旋翼機數據處理及傳輸系統設計

摘要 警用旋翼機系統以小型無人旋翼機為工作平臺,主要應用于執勤和處突現場的偵察和監視。其中數據處理及傳輸系統包括旋翼機平臺控制子系統、視頻信息采集處理和傳輸子系統。給出了旋翼機平臺控制系統結構框圖和視頻采集、處理模塊的數據接口圖。視頻采集和處理模塊中,分別選用SAA7111A為視頻采集芯片和Hi3510為視頻處理、壓縮芯片,通過高帶寬的WIMAX模塊進行無線傳輸。滿足圖像處理的高壓縮比和低失真要求。
關鍵詞 旋翼機;視頻處理;無線數據傳輸
旋翼機是一種介于直升機和固定翼飛機之間的飛行器。早在上世紀二三十年代就開始研制,它產生時間比直升機早,由于軍方不重視、駕駛員操作不當、經常引起飛行事故等原因,使得旋翼機的研制一度陷入低谷。近年來,由于其自身一系列優點,旋翼機又成為國內外的研制熱點。
設計的數據處理及傳輸系統以旋翼機為飛行平臺,根據任務需求,搭載了CCD高分辨率攝像機,從控制邏輯上分為旋翼機平臺控制系統和視頻數據采集處理系統兩部分,設計上是統一的整體。
1 旋翼機平臺簡介
旋翼機平臺由最基本的機身、動力系統、尾面和起落架構成,其中動力系統由發動機或電源、旋翼系統和螺旋槳組成。旋翼機與直升機和固定翼飛機的最大區別就在于動力系統的不同。
旋翼機的前行動力是由螺旋槳產生的推/拉或其它類似于這種推/拉力的供能方式提供,升力是由前方氣流吹動旋翼自轉提供。同時,由于旋翼采用自轉的方式,不需要像直升機一樣用尾槳抵消旋翼產生的扭力,結構比直升機簡單很多,其氣動效率也比直升機高,具有結構簡單、經濟性高;操作、維護方便;起降距離短,不需要專門機場;可靠性高等特點曾一度被稱為“最安全的飛行器”。
2 系統總體設計
2.1 旋翼機平臺控制子系統設計
旋翼機平臺控制子系統的設計是整個系統設計基礎,優良的任務平臺才能確保各種任務載荷正常工作。旋翼機平臺控制部分按完成功能的不同可以劃分為數傳電臺、獲取平臺狀態信息傳感器部分、平臺控制計算機、執行器驅動系統以及電源模塊。控制子系統的具體結構如圖1所示。
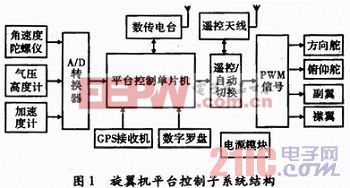
獲取平臺狀態信息的傳感器有角速度陀螺儀、氣壓高度計、加速度計、數字羅盤、GPS導航模塊。其中,角速度陀螺儀、氣壓高度計和加速度計采集模擬信號,需經過模/數轉換后傳送至平臺控制單片機,數字羅盤和GPS導航模塊產生的數字信號直接傳輸至單片機。
平臺控制單片機是控制子系統的核心計算部件,它在每個控制周期內利用PID控制算法,實時處理采集的傳感器數據,將得到的旋翼機平臺姿態和位置信息,通過數傳電臺傳輸至地面指揮、遙控中心。同時,根據實際計算出的控制量,轉化為相應PWM信號驅動舵機工作,保持平臺穩定飛行。
2.2 視頻采集與處理電路設計
視頻采集與處理模塊關鍵芯片的選取主要考慮3個因素:
(1)旋翼機上CCD攝像機在高空對地面物體進行拍攝,要在遠距離采集高質量視頻信號,攝像機必須具備良好聚焦和變倍性能。
(2)結合圖像傳輸失真要求和無線傳輸帶寬實際情況,要選擇合適的視頻編碼壓縮算法和壓縮方式。
(3)為方便搭建邏輯控制電路,選取系列化具有通用無縫接口的采集芯片和編碼壓縮芯片。





評論