全方位太陽輻照度測(cè)量系統(tǒng)設(shè)計(jì)

摘要:設(shè)計(jì)一種以DSP為核心的全方位太陽輻照度測(cè)量系統(tǒng),利用安裝在云臺(tái)上的太陽能電池板的轉(zhuǎn)動(dòng)以獲取全方位的太陽輻照度數(shù)據(jù)。通過對(duì)采集到的數(shù)據(jù)進(jìn)行分析,既可以測(cè)試太陽能電池板在各種安裝方式(如平放、斜放和幕墻)下的發(fā)電效率,又可對(duì)光伏建筑一體化的光伏電站建設(shè)方案進(jìn)行評(píng)估,還可在建成之后對(duì)光伏電站的發(fā)電狀態(tài)進(jìn)行管理和監(jiān)測(cè)。
關(guān)鍵詞:太陽輻照度;光伏建筑;DSP;云臺(tái)
引言
通過對(duì)長期采集到的數(shù)據(jù)進(jìn)行分析,可以得到當(dāng)?shù)毓夥ㄖ惑w化中太陽能電池板在不同方位角和俯仰角下的發(fā)電效率,以此來評(píng)估在光伏建筑一體化中光伏發(fā)電方案的可行性。
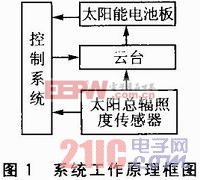
1 系統(tǒng)工作原理
本系統(tǒng)由云臺(tái)、太陽能電池板、太陽總輻照度傳感器和控制系統(tǒng)構(gòu)成,其工作原理框圖如圖1所示。控制系統(tǒng)通過控制云臺(tái),使得安裝在云臺(tái)上的太陽能電池板能夠在縱向和橫向上掃描,從而采集到全方位的太陽輻照度數(shù)據(jù)。太陽總輻照度由控制系統(tǒng)直接讀取安裝在固定水平面上的太陽總輻照度傳感器而得來,其值是用來標(biāo)定太陽能電池板的發(fā)電功率所折算得到的全方位太陽輻照度。在實(shí)際的光伏發(fā)電中,由于太陽能電池板的固有特性,太陽總輻照度不能完全表征光伏發(fā)電的效率,因此通過太陽能電池板的發(fā)電功率所折算得到的太陽輻照度在光伏建筑一體化中才有實(shí)際的指導(dǎo)意義。我國大部分地區(qū)處住北回歸線以上,縱向上能夠讓太陽能電池板在水平和垂直方向之間轉(zhuǎn)動(dòng),橫向上能夠讓太陽能電池板在正東和正兩方向之間經(jīng)過正南轉(zhuǎn)動(dòng),即可滿足設(shè)計(jì)要求。通過控制系統(tǒng)來控制云臺(tái),就可以獲取太陽能電池板準(zhǔn)確的方位角和俯仰角,方位角的范圍為0~180°,俯仰角的范圍為0~90°。
2 系統(tǒng)硬件設(shè)計(jì)
本系統(tǒng)以ADSP-BF506F(簡(jiǎn)稱BF506F)處理器為核心,其硬件結(jié)構(gòu)如圖2所示。BF506F處理器內(nèi)核時(shí)鐘可高達(dá)400MHz,片上有68 KB L1存儲(chǔ)器、4 MB可執(zhí)行閃存,能夠滿足本系統(tǒng)的設(shè)計(jì)要求。本系統(tǒng)采用了BF506F處理器的UART的DMA方式,具有SPI、TWI、PWM單元、TIMER、ADC、PGIO等各種接口和功能單元,可方便實(shí)現(xiàn)云臺(tái)的控制、數(shù)據(jù)的采集以及與PC機(jī)的通信。
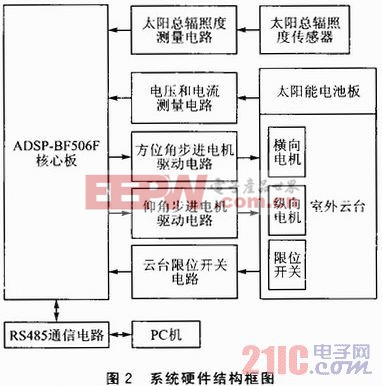
BF506F處理器通過步進(jìn)電機(jī)驅(qū)動(dòng)電路來控制云臺(tái)的轉(zhuǎn)動(dòng),讓安裝在云臺(tái)上的太陽能電池板能夠在橫向和縱向上轉(zhuǎn)動(dòng);云臺(tái)內(nèi)部有限位開關(guān),通過調(diào)節(jié)限位開關(guān)的位置來設(shè)定太陽能電池的轉(zhuǎn)動(dòng)范圍;當(dāng)太陽能電池轉(zhuǎn)動(dòng)了一定的角度后,BF506F就采集一次數(shù)據(jù)并將數(shù)據(jù)發(fā)送到PC機(jī),所采集的數(shù)據(jù)包括太陽總輻照度和太陽能電池的電壓、電流值;當(dāng)BF506F接收PC機(jī)發(fā)送的指令后就執(zhí)行相應(yīng)的動(dòng)作,從而實(shí)現(xiàn)系統(tǒng)的自動(dòng)運(yùn)行。
2.1 步進(jìn)電機(jī)驅(qū)動(dòng)電路
步進(jìn)電機(jī)的驅(qū)動(dòng)電路以東芝的TB6560為主芯片,其驅(qū)動(dòng)電路如圖3所示。步進(jìn)電機(jī)控制信號(hào)有3個(gè)(CLK、CW、ENABLE),分別控制電機(jī)的轉(zhuǎn)角和速度、電機(jī)正反方向以及使能,均須用光耦隔離后與芯片連接。光耦的前向和后向電源應(yīng)該是單獨(dú)隔離電源,否則不能起到隔離干擾
的作。OUT_AP、OUT_AM、OUT_BP、OUT_BM引腳分別為電機(jī)2相輸出接口,內(nèi)部集成了續(xù)流二極管。
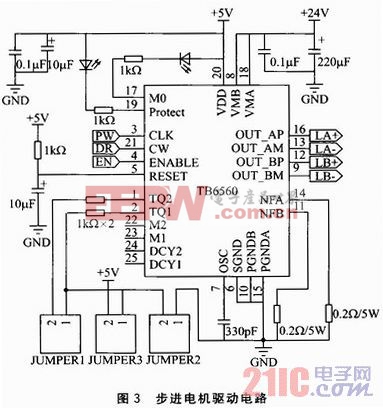
NFA、NFB分別為電機(jī)A、B相最大驅(qū)動(dòng)電流定義引腳,其最大電流計(jì)算公式如下:
IOUT=0.5 V/RNF
若預(yù)先定義電機(jī)每相的最大驅(qū)動(dòng)電流為2.5 A,取RNF=0.2Ω。M2、M1為細(xì)分設(shè)置引腳,外接撥碼開關(guān)可設(shè)定不同的細(xì)分值,如整步、半步、1/8細(xì)分、1/16細(xì)分。由于步進(jìn)電機(jī)在低頻工作時(shí),有振動(dòng)大、噪聲大的缺點(diǎn),需要細(xì)分解決。為盡可能減小電機(jī)發(fā)熱,需要TB6560的TQ2和TQ1引腳電平在電機(jī)工作時(shí)設(shè)置為電流輸出最大,在電機(jī)不工作時(shí)電流減半甚至更小,故稱為“自動(dòng)半流電路”。用NFA、NFB定義最大輸出電流后,通過TQ2和TQ1設(shè)置電流比率輸出,設(shè)為00、01、10、11時(shí),輸出的電流分別為最大電流的100%、75%、50%、25%。改變電機(jī)的驅(qū)動(dòng)電流,也就改變了電機(jī)輸出扭矩的大小。
2.2 太陽總輻照度測(cè)量電路
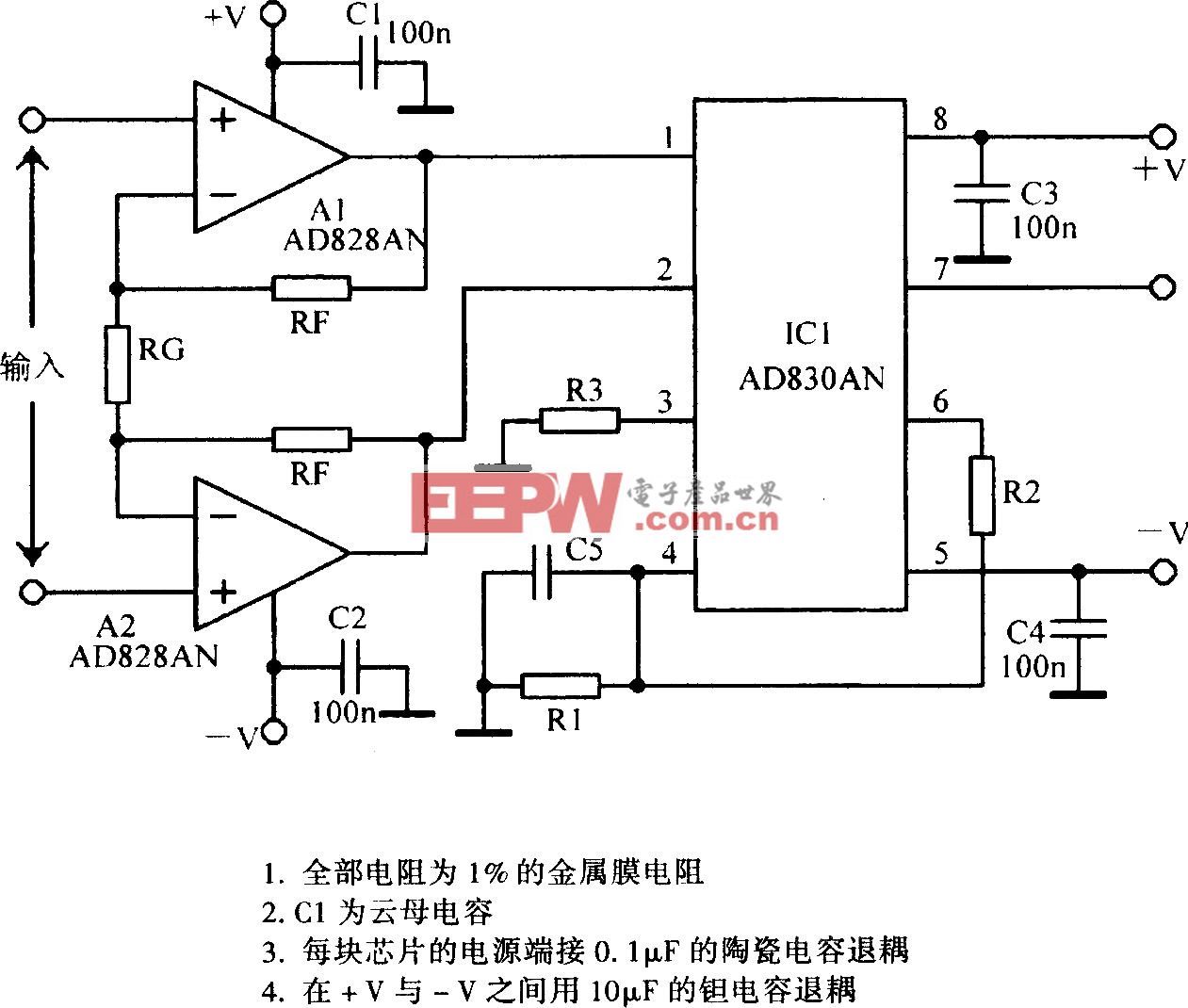
太陽總輻照度在本系統(tǒng)中是一個(gè)標(biāo)定量,用來標(biāo)定通過測(cè)量太陽能電池的功率來計(jì)算得的太陽輻照度。太陽總輻照度是通過讀取國家一級(jí)輻照傳感器TBQ-2值而得到的。太陽總輻照度傳感器輸出的信號(hào)電壓為0~20mV,對(duì)應(yīng)的是輻照度為0~2000 W/m2,因此先對(duì)傳感器輸出的信號(hào)進(jìn)行放大,再進(jìn)行模/數(shù)轉(zhuǎn)換,最后通過計(jì)算即可得到太陽總輻照度的值。
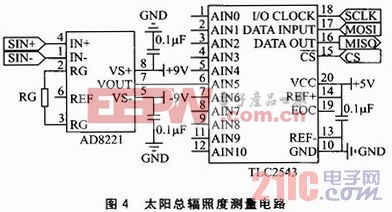
太陽總輻照度的測(cè)量電路如圖4所示。信號(hào)放大所采用的是增益可編程、高性能儀表放大器AD8221,通過單一電阻可在1~1000范圍內(nèi)設(shè)置增益。模/數(shù)轉(zhuǎn)換采用的是帶有SPI接口的12位模數(shù)轉(zhuǎn)換器TLC2543。BH506F核心板通過SPI接口即可讀取太陽總輻照度的值。
式中,UIN為太陽總輻照度傳感器的輸出信號(hào)電壓,其范圍為0~20 mV;因?yàn)橐獙?~20 mV信號(hào)放大到0~5 V,所以RG的值為198.4 Ω;太陽總輻照度Ee的單位是W/m2;可測(cè)量到的最大輻照度Emax為2000W/m2,可放大到的最大電壓Umax為5V。
2.3 太陽輻照度測(cè)量電路
由于太陽能電池發(fā)電的功率與太陽的輻照成正比,本系統(tǒng)通過測(cè)量太陽能電池板的功率來計(jì)算太陽輻照度。其測(cè)量電路如圖5所示。AV +、AV-為太陽能電池板電壓輸出的正極和負(fù)極,RE為高精密的測(cè)量電阻,RL為5 W的功率電阻;SDA和SCL為TWI接口的兩根信號(hào)線,接BF506F核心板的TWI接口。BF506F通過TWI接口可以直接讀取VIN-相應(yīng)的電壓UVIN-,以及VIN+和VIN-的電壓差UVIN。
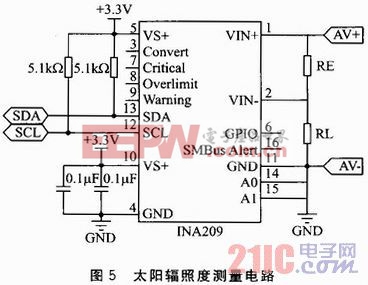
根據(jù)雙向電流、電壓與電源監(jiān)控器INA209的測(cè)量原理和太陽輻照度與太陽能電池發(fā)電功率的關(guān)系可以計(jì)算出太陽輻照度。太陽能電池板電流IRE和太陽輻照度Ep的計(jì)算公式如下:![]()
式中,太陽輻照度Ep的單位為W/m2;S為太陽能電池板的面積,其值為637 cm2;ψ為多晶硅太陽能電板的轉(zhuǎn)換效率,其值為12%。
2.4 系統(tǒng)通信部分
系統(tǒng)通信原理框圖如圖6所示,采用RS485來進(jìn)行數(shù)據(jù)的傳輸。本文的測(cè)量平臺(tái)是放置在較為空曠的室外,以便能采集到較為理想的數(shù)據(jù),而接收機(jī)(PC機(jī))放置在室內(nèi),這兩者之間的距離比較遠(yuǎn),采用RS485總線進(jìn)行數(shù)據(jù)傳輸能夠符合本系統(tǒng)的要求。在此用的是全雙工通信方式,即發(fā)送和接收可同時(shí)進(jìn)行,互不受影響。采用4根信號(hào)線,2根負(fù)責(zé)接收數(shù)據(jù),另外2根負(fù)責(zé)發(fā)送數(shù)據(jù)。

3 系統(tǒng)軟件設(shè)計(jì)
圖7為系統(tǒng)的程序流程。上電后先對(duì)BF506F核心板進(jìn)行初始化,包括初始化UART、ADC、TIMER、PGIO、SPI、TWI等。當(dāng)系統(tǒng)初始化完成
后便開始運(yùn)行主程序,首先測(cè)量并計(jì)算運(yùn)動(dòng)控制算法所需要的各個(gè)參數(shù),要測(cè)量的有縱向電機(jī)從水平方向轉(zhuǎn)動(dòng)到垂直方向的總步數(shù)和橫向電機(jī)從正東方向轉(zhuǎn)動(dòng)到正西方向的總步數(shù)。當(dāng)計(jì)算完參數(shù)后就開始執(zhí)行運(yùn)動(dòng)控制算法A,執(zhí)行完畢后對(duì)運(yùn)動(dòng)控制算法B的起點(diǎn)進(jìn)行重新定位,然后執(zhí)行控制算法B。當(dāng)執(zhí)行完運(yùn)動(dòng)控制算法B后對(duì)運(yùn)動(dòng)控制算法的各個(gè)數(shù)據(jù)進(jìn)行重新測(cè)量和計(jì)算,如此一直循環(huán)下去,直到程序被停止。
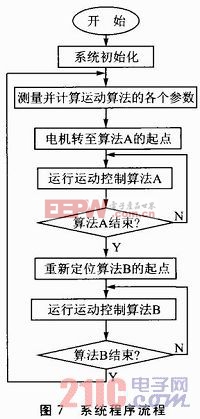
算法A中縱向步進(jìn)電機(jī)通過頻繁地來同轉(zhuǎn)動(dòng)可獲得縱向上(俯仰角)準(zhǔn)確的數(shù)據(jù);算法B中橫向步進(jìn)電機(jī)通過頻繁地來回轉(zhuǎn)動(dòng)可獲得橫向上(方位角)準(zhǔn)確的數(shù)據(jù)。此兩種算法在不停地交替執(zhí)行,不但可以在橫向和縱向上獲取豐富準(zhǔn)確的數(shù)據(jù),而且可以延長步進(jìn)電機(jī)的使用壽命。
在本系統(tǒng)中,定義正東方向?yàn)?°,正南方向?yàn)?0°,正西方向?yàn)?80°,通過控制橫向步進(jìn)電機(jī)的轉(zhuǎn)動(dòng)使得太陽能電池板在橫向0°和180°之間轉(zhuǎn)動(dòng);定義太陽能電池板與地面平行時(shí)為0°,太陽能電池板與地面垂直時(shí)為90°,通過控制縱向步進(jìn)電機(jī)的轉(zhuǎn)動(dòng)使得太陽能電池板在縱向0°和90°之間轉(zhuǎn)動(dòng)。同時(shí)還定義橫向?yàn)閄,縱向?yàn)閅,則太陽能電池板運(yùn)動(dòng)到某一點(diǎn)時(shí)可用(x,y)來表示。下面是算法A和算法B的具體執(zhí)行過程。
算法A的起點(diǎn)為(0,0)點(diǎn),終點(diǎn)為(180,90)點(diǎn)。縱向步進(jìn)電機(jī)每轉(zhuǎn)動(dòng)90°,橫向步進(jìn)電機(jī)就向180°點(diǎn)(正西方向)方向轉(zhuǎn)動(dòng)3°,當(dāng)橫向步進(jìn)電機(jī)轉(zhuǎn)動(dòng)到180°點(diǎn)后就結(jié)束算法A。其程序執(zhí)行順序如下:
①縱向步進(jìn)電機(jī)從0°點(diǎn)向90°點(diǎn)運(yùn)動(dòng)1°。
②判斷縱向電機(jī)是否到達(dá)90°點(diǎn),“是”則接著運(yùn)行,“否”則返回第1步。
③橫向步進(jìn)電機(jī)從0°點(diǎn)向180°點(diǎn)運(yùn)動(dòng)3°。
④判斷橫向電機(jī)是否到達(dá)180°,“是”則結(jié)束算法A,“否”則接著運(yùn)行。
⑤縱向步進(jìn)電機(jī)從90°點(diǎn)向0°點(diǎn)運(yùn)動(dòng)1°。
⑥判斷縱向電機(jī)是否到達(dá)0°點(diǎn),“是”則接著運(yùn)行,“否”則返回第5步。
⑦橫向步進(jìn)電機(jī)從0°點(diǎn)向180°點(diǎn)運(yùn)動(dòng)3°。
⑧判斷橫向電機(jī)是否到達(dá)180°,“是”則結(jié)束算法A,“否”則接著運(yùn)行。
算法B的起點(diǎn)為(180,90)點(diǎn),終點(diǎn)為(0.0)點(diǎn)。橫向步進(jìn)電機(jī)每轉(zhuǎn)動(dòng)180°,縱向步進(jìn)電機(jī)就向0°點(diǎn)(水平方向)方向轉(zhuǎn)動(dòng)3°,當(dāng)橫向步進(jìn)電機(jī)轉(zhuǎn)動(dòng)到0°點(diǎn)后就結(jié)束算法B。其程序執(zhí)行順序如下:
①橫向步進(jìn)電機(jī)從180°度點(diǎn)向0°點(diǎn)運(yùn)動(dòng)1°。
②判斷橫向電機(jī)是否到達(dá)0°點(diǎn),“是”則接著運(yùn)行,“否”則返回第1步。
③縱向步進(jìn)電機(jī)從90°點(diǎn)向0°點(diǎn)運(yùn)動(dòng)3°。
④判斷縱向電機(jī)是否到達(dá)90°,“是”則結(jié)束算法B,“否”則接著運(yùn)行。
⑤橫向步進(jìn)電機(jī)從0°點(diǎn)向180°點(diǎn)運(yùn)動(dòng)1°。
⑥判斷橫向電機(jī)是否到達(dá)180°點(diǎn),“是”則繼續(xù),“否”則返回第5步。
⑦縱向步進(jìn)電機(jī)從90°點(diǎn)向0°點(diǎn)運(yùn)動(dòng)3°。
⑧判斷縱向電機(jī)是否到達(dá)0°,“是”則結(jié)束算法B,“否”則返回第1步。
結(jié)語
本系統(tǒng)的硬件實(shí)物圖如圖8所示。設(shè)計(jì)本系統(tǒng)是為了獲取全方位的太陽輻照度數(shù)據(jù),其要求是在準(zhǔn)確的方位角和俯仰角下采集到精確的太陽輻照度數(shù)據(jù)。在本系統(tǒng)中,影響數(shù)據(jù)精度的有兩個(gè)方面:一是測(cè)量電路本身,為了減小太陽輻照度數(shù)據(jù)的誤差,在硬件上改進(jìn)測(cè)量電路,在軟件上優(yōu)化測(cè)量算法;二是云臺(tái)所造成的誤差,為了更加準(zhǔn)確地定位太陽能電池板的方位,可以改進(jìn)云臺(tái)內(nèi)部的步進(jìn)電機(jī)和齒輪,以及優(yōu)化云臺(tái)的控制算法。經(jīng)過長期地運(yùn)行本系統(tǒng),各功能模塊工作正常,測(cè)得數(shù)據(jù)真實(shí)可靠。

接地電阻相關(guān)文章:接地電阻測(cè)試方法
光耦相關(guān)文章:光耦原理
模數(shù)轉(zhuǎn)換器相關(guān)文章:模數(shù)轉(zhuǎn)換器工作原理
光伏發(fā)電相關(guān)文章:光伏發(fā)電原理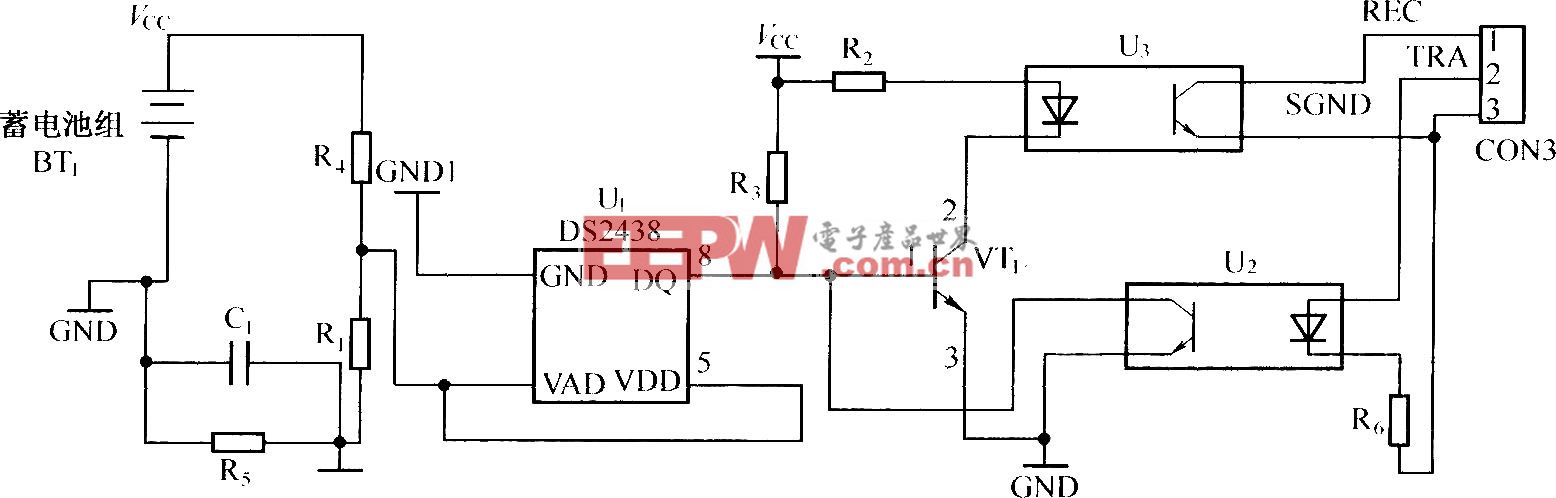






評(píng)論