基于PXI和cRIO的ESP硬件在環(huán)仿真平臺(tái)的構(gòu)建

上位機(jī)監(jiān)控軟件 本文引用地址:http://www.104case.com/article/193387.htm
上位機(jī)監(jiān)控軟件主要分為兩個(gè)部分:仿真過程監(jiān)控和查看仿真數(shù)據(jù)。仿真過程監(jiān)控包括參數(shù)調(diào)用、仿真控制、參數(shù)實(shí)時(shí)監(jiān)控、仿真過程中駕駛員輸入等功能,并且可以對仿真模式、換檔策略、仿真時(shí)間等進(jìn)行配置,方便靈活地實(shí)現(xiàn)各種情況的仿真。
查看仿真數(shù)據(jù)部分,可以觀察對比仿真數(shù)據(jù),仿真過程中車輛運(yùn)動(dòng)回放、數(shù)據(jù)保存和調(diào)用情況。仿真過程控制界面如圖3所示。
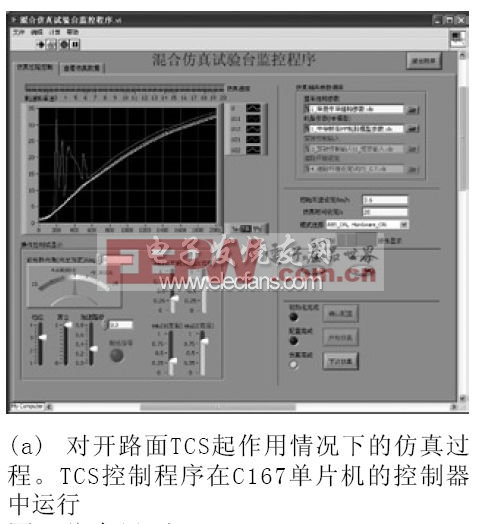
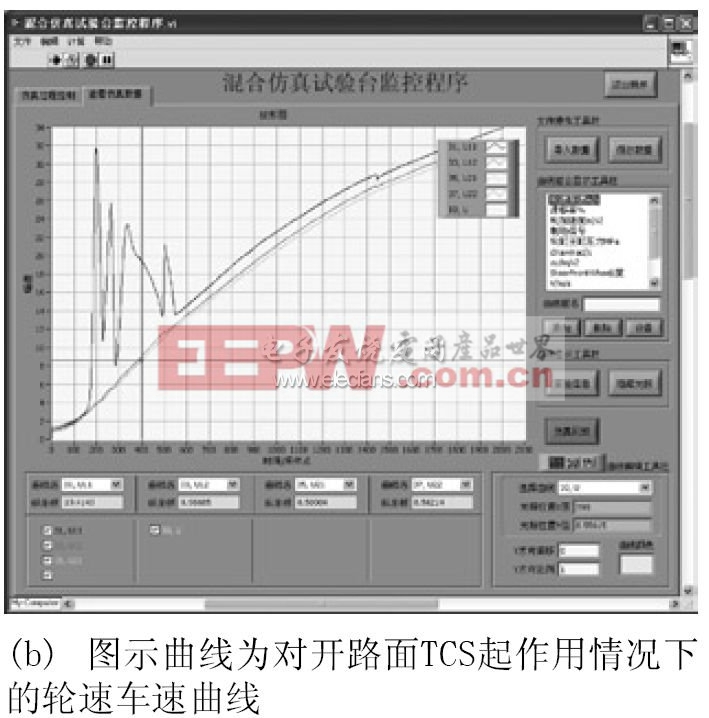
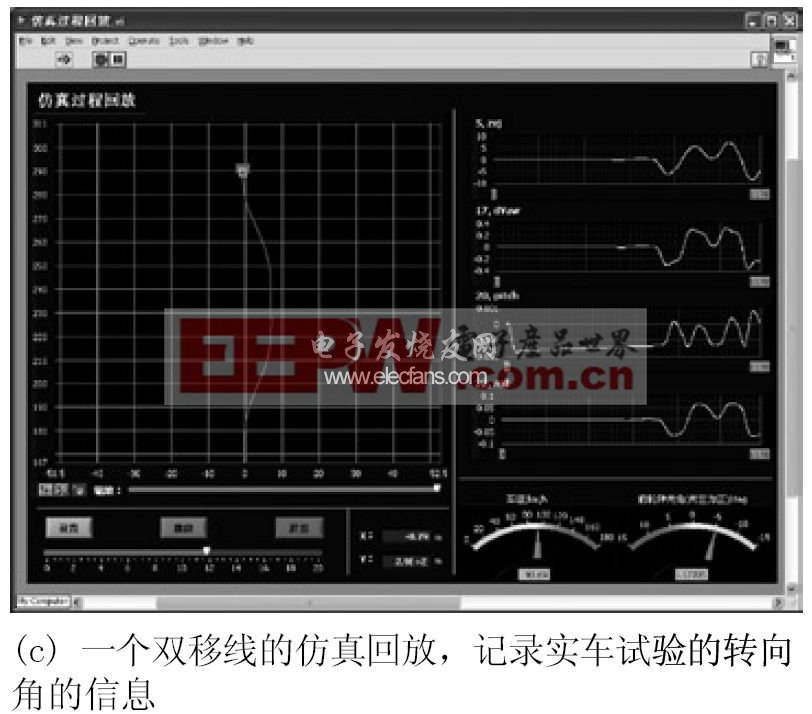
圖3 仿真界面
其中,圖3(b)中可以觀察仿真過程中70個(gè)參數(shù)的變化曲線。可以保存和調(diào)用仿真數(shù)據(jù),可以通過點(diǎn)擊右下方的“仿真回放”按鍵,圖像化顯示車輛運(yùn)行軌跡。 圖3(c)中,可以將記錄下的轉(zhuǎn)向角信息在仿真過程中按照實(shí)際的時(shí)間間隔輸入給系統(tǒng),仿真可以得到車輛的響應(yīng)情況。
下位機(jī)仿真軟件
下位機(jī)運(yùn)行整車模型,采用了15自由度整車模型。這15個(gè)自由度分別為:車輛縱向、橫向、垂向的平動(dòng)和轉(zhuǎn)動(dòng)這6個(gè)自由度,四個(gè)車輪的轉(zhuǎn)動(dòng)和垂向平動(dòng)8個(gè)自由度,轉(zhuǎn)向系統(tǒng)的1個(gè)自由度。
在仿真過程中,下位機(jī)以1ms為周期通過數(shù)據(jù)采集卡采集主缸和4個(gè)輪缸的壓力信號(hào),從而計(jì)算車輛受力,得到車輛運(yùn)動(dòng)狀態(tài)。并將狀態(tài)參數(shù)通過數(shù)據(jù)采集卡輸出給控制器。同時(shí)下位機(jī)將車輛運(yùn)動(dòng)狀態(tài)參數(shù)以10ms為周期將數(shù)據(jù)保存在下位機(jī)內(nèi)存中,仿真結(jié)束后上傳到上位機(jī)。并且下位機(jī)以10ms為周期不斷檢測上位機(jī)所發(fā)出的控制信號(hào),比如轉(zhuǎn)向信號(hào)、換檔信號(hào)、油門信號(hào)等。這種并行結(jié)構(gòu)的實(shí)現(xiàn),使得復(fù)雜的功能得以方便地實(shí)現(xiàn)。
控制器軟件
控制器上運(yùn)行的為ESP控制算法。控制器通過接收各種傳感器的信號(hào),判斷車輛狀態(tài)是否為危險(xiǎn)工況,如果檢測到危險(xiǎn),就會(huì)輸出控制指令給執(zhí)行器,通過電機(jī)和電磁閥的動(dòng)作來對制動(dòng)系統(tǒng)進(jìn)行主動(dòng)干預(yù),同時(shí)通過CAN通信發(fā)指令給發(fā)動(dòng)機(jī)管理系統(tǒng),控制車輛驅(qū)動(dòng),從而化解危機(jī)。考慮試驗(yàn)臺(tái)的兼容性,控制器部分可以采用NI cRIO作為控制器,并采用第一代ESP控制器(主控芯片為C167),也可以采用第二代ESP控制器(主控芯片為XC164)。
仿真結(jié)果
將仿真結(jié)果與實(shí)車試驗(yàn)結(jié)果相對比,兩者吻合程度很好,說明該硬件在環(huán)仿真平臺(tái)能有效地對車輛運(yùn)動(dòng)狀態(tài)進(jìn)行仿真。該仿真平臺(tái)的搭建可以加速ESP控制算法的開發(fā)。
圖4為在某種參數(shù)下測試ABS功能的一組輪速數(shù)據(jù),和實(shí)車試驗(yàn)結(jié)果很類似,說明仿真平臺(tái)精度很高。
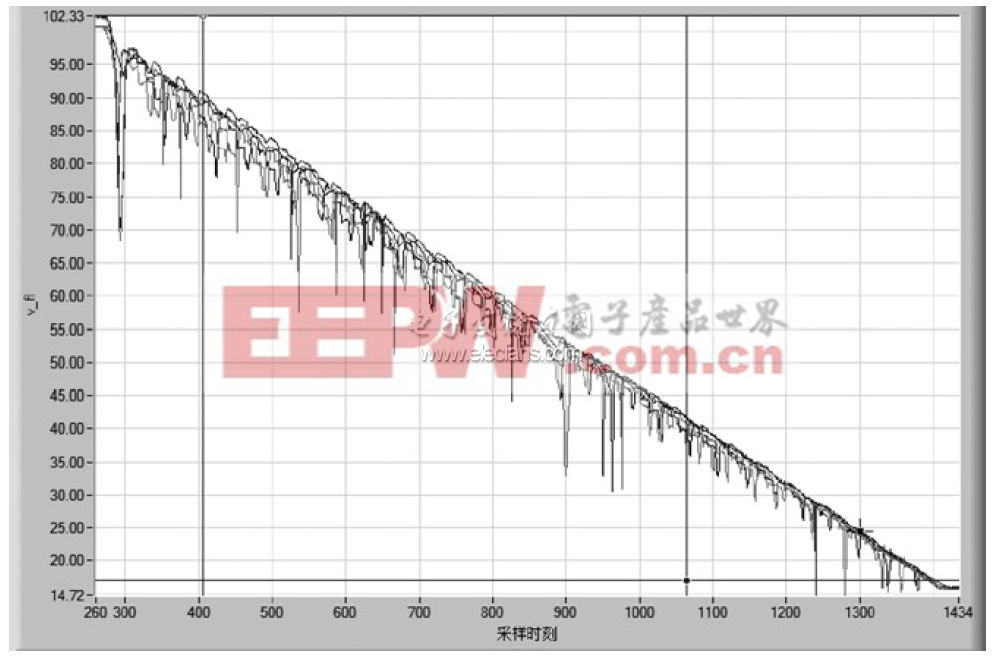
圖4 某種參數(shù)下測試AVS功能的一組輪速數(shù)據(jù)
結(jié)論
本文基于PXI和cRIO搭建了ESP硬件在環(huán)仿真平臺(tái)。平臺(tái)可以將控制器放在仿真回路中,方便對控制器中的算法進(jìn)行測試。仿真試驗(yàn)臺(tái)的搭建提高了ESP控制算法的開發(fā)速度。





評論