基于C8051F020的高精度超聲波測距系統設計

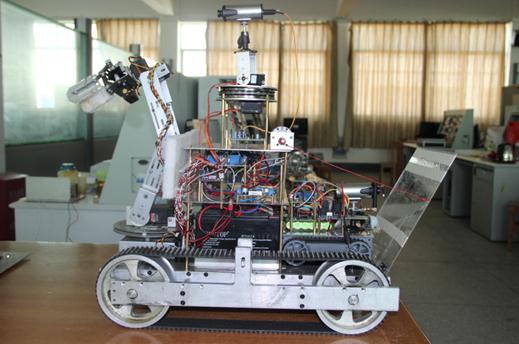
摘要:利用C8051F020單片機設計高精度非接觸式的超聲波測距。該系統利用4個HC-SR04超聲波測距模塊,四面測距,簡化電路,減少了其他電路對超聲波測距的干擾。在提高精度方面采用溫、濕度補償,電路使用DS18B20及濕敏電容器HS1101。系統測距范圍2~400 cm,精度1 cm,并采用LCD12864顯示溫、濕度和四面距離。該系統具有結構簡單,工作可靠,精度高的優點,實時顯示四周障礙距離及溫、濕度,可置于小車上,用于避障,智能導航等。
關鍵詞:超聲波測距;智能導航;C8051F020;HC-SRO4
0 引言
超聲波是由壓電陶瓷的壓電效應產生,這種壓電陶瓷傳感器有2塊壓電晶片和一塊共振板,當給它的兩極加頻率等于晶片固有頻率的脈沖信號時,壓電晶片就會發生共振,并帶動共振板振動,從而產生超聲波。它的頻率高于20 kHz,具有方向性好,穿透能力強,易于獲得較集中的聲能的優點,且對色彩,光照度,電磁場不敏感,不易受干擾。超聲波測距技術是基于無目視能力的生物(蝙蝠等)防御及捕捉獵物生存的原理,利用超聲波在空氣媒介中傳播,碰到障礙物反射回來的時間間隔長短及被反射波的強弱判斷障礙物的性質和位置的方法。它是一種非接觸式檢測方式,它不受光照度、電磁場、被測物色彩等因素的影響,信息處理簡單,速度快,成本低。本文采用單片機模控制超聲波模塊發射接收,并結合溫濕度補償電路,實現高精度的四周距離檢測。
1 整體方案設計
方案的主要任務是實現控制電路對四周的精確測距。通過MCU端口產生40 kHz的方波信號,發送至HC-SR04超聲波測距模塊的發射引腳,發射后定時器T1計數,并等待接收引腳電平變低,將定時器T1關閉,讀出定時器的寄存器中的值,結合溫濕度電路的采集的信號轉化出實時的聲速和頻率,利用公式:
L=TV/2
式中:L為距離;T為定時器的計數值;V為相應環境下的聲音在空氣中在空氣中傳播的速度。
2 硬件電路設計
2.1 硬件總體設計
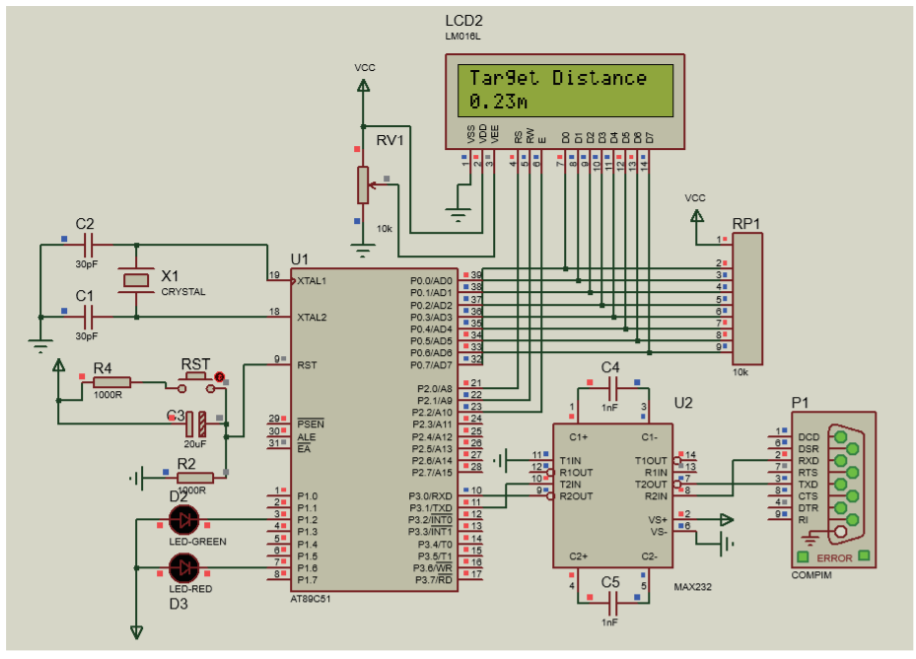
整個系統主要由單片機控制電路,超聲波測距模塊,溫度采集電路,濕度采集電路,LCD顯示器和電源電路組成。其中單片機控制電路是用于控制超聲波產生和轉化外部采集數據;溫度采集電路是用于采集當前外部溫度,得出當前聲速;濕度采集電路是用于采集當前外部濕度得出當前頻率;LCD顯示器是用于實時顯示環境溫度,濕度及電路所測四周的距離。電源電路是用于為系統各個模塊提供穩定的電源,保證各部分正常工作。系統總體電路設計如圖1所示。

2.2 超聲波測距模塊
HC-SR04超聲波測距模塊可提供2~400 cm的非接觸式距離感測功能,模塊包括超聲波發射器、接收器與控制電路。
基本工作原理:
(1)給模塊的發射I/O口送入超聲波信號,要求至少10μs的高電平信號,本系統提供40 kHz信號,高電平持續12.5μs。
(2)有信號返回,模塊的輸出I/O口輸出一個高電平,高電平持續時間就是超聲波從發射到返回的時間。測距距離=(高電平時間×聲速)/2。
(3)被測物體的面積不少于0.5 m2且平面盡量要求平整,否則影響測量的結果。









評論