基于CAN總線的分布式車間溫濕度檢測系統(tǒng)

4 溫濕度檢測模塊的設計
4.1 溫濕度檢測模塊的硬件設計
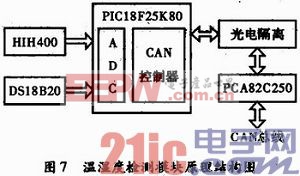
檢測模塊大體可分為主控器、溫度傳感器、濕度傳感器、CAN驅(qū)動器4個部分:
(1)主控器同樣采用了PIC18F25K80單片機。6路撥碼開關(guān)連接至單片機的I/O口,用于設定檢測模塊在CAN總線上的站號,設定站號范圍為1100 0000~111l 1111。
(2)溫度傳感器采用Dallas公司生產(chǎn)的一線式數(shù)字溫度傳感器DS18B20,該傳感器它具有微型化、低功耗、高性能、抗干擾能力強等優(yōu)點,DS18B20可直接將溫度轉(zhuǎn)化成串行數(shù)字信號給單片機處理,溫度測量的范圍為-55~+125℃,測溫分辨率可達0.062 5℃,測溫范圍與精度完全符合項目要求。
(3)濕度傳感器采用Honeywell公司生產(chǎn)的HIB4000相對濕度傳感器,該傳感器內(nèi)部集成了信號處理功能電路,可將相對濕度值變換成電容值,再將電容值轉(zhuǎn)換成線性電壓輸出。PIC18F25K80單片機片內(nèi)集成一個8路輸入的A/D模塊,可將HIH4000輸出的線性電壓模擬量直接轉(zhuǎn)換為一個12位的數(shù)字量并存儲在PIC18F25K80單片機中。
(4)與通信模塊相同,PIC18F25K80的CAN收發(fā)引腳CANRX、CANTX通過2只光耦6N137與CAN驅(qū)動器PCA82C250相連,PCA82C250直接接入CAN總線。本文引用地址:http://www.104case.com/article/192794.htm
4.2 溫濕度檢測模塊的軟件設計
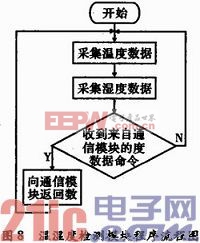
檢測模塊不斷讀取溫度傳感器和濕度傳感器采集的數(shù)據(jù),每次采集完溫度與濕度數(shù)據(jù)后,檢測是否有來自通信模塊的讀數(shù)據(jù)命令,如果有則將采集的溫度與濕度數(shù)據(jù)返回給通信模塊,如果沒有則繼續(xù)讀取溫度傳感器和濕度傳感器采集的數(shù)據(jù),程序流程如圖8所示。
與通信模塊一致,檢測模塊的CAN通信數(shù)據(jù)幀格式同樣采用標準幀數(shù)據(jù)格式。其中,2的TX識別碼分別設定為數(shù)據(jù)源地址和數(shù)據(jù)目標地址,即第1 Byte被設定為檢測模塊站號,第2 Byte被設定為與之連接的通信通道的站號;數(shù)據(jù)字節(jié)僅使用3個,第1 Byte和第2 Byte高4位共計12位用于存放來自溫度傳感器的數(shù)據(jù),第2 Byte的低4位和第3 Byte共計12位用于存放來自濕度傳感器的數(shù)據(jù),將溫濕度傳感器取得的兩
個12位數(shù)字量壓縮為3 Byte并寫入CAN驅(qū)動器發(fā)送緩沖區(qū)可有效提高數(shù)據(jù)更新速率。
5 結(jié)束語
現(xiàn)場總線技術(shù)的發(fā)展、單片機功能的增強、傳感器線性化與集成度的提高等技術(shù),為系統(tǒng)的設計帶來了便利,也為該檢測系統(tǒng)的穩(wěn)定性提供了保障;Dot Net技術(shù)的發(fā)展為快速開發(fā)穩(wěn)定可靠的計算機應用程序提供了條件。經(jīng)開發(fā)設計,系統(tǒng)目前尚處于小規(guī)模試運行階段,經(jīng)過一段時間的試運行證明本系統(tǒng)具有穩(wěn)定可靠、通信距離遠、抗干擾能力強等諸多優(yōu)點,能滿足企需求。

pid控制相關(guān)文章:pid控制原理
土壤濕度傳感器相關(guān)文章:土壤濕度傳感器原理









評論