使用雙軸加速度計進行傾斜測量

靈敏度失配誤差的影響
在雙軸傾斜檢測應(yīng)用中,主要誤差成分是目標軸之間的靈敏度差異(在單軸解決方案中,如果實際靈敏度和預(yù)期靈敏度之間存在任何偏差,則會導(dǎo)致出現(xiàn)誤差)。由于使用的是X和Y軸的比值,因此如果兩者靈敏度相同,則可以消除大多數(shù)誤差。
下面舉例說明加速度計靈敏度失配情況。假設(shè)某個雙軸解決方案具有完美的失調(diào)調(diào)整功能,且Y軸具有完美的靈敏度,但X軸的靈敏度為+5%。在1 g場中,Y軸讀數(shù)為1 g,X軸讀數(shù)則為1.05 g。圖8所示為因為這種靈敏度失配而造成角度計算出現(xiàn)的誤差情況。與失調(diào)誤差類似,加速度計靈敏度失配引起的誤差會在整個旋轉(zhuǎn)范圍內(nèi)不斷變化,使在計算出傾斜角后進行誤差補償變得困難。

Figure 8. Calculated Angle Error Due to Accelerometer Sensitivity Mismatch
無調(diào)頭校準技術(shù)
當失調(diào)引起的誤差和靈敏度失配引起的誤差兩者相疊加時,總誤差可能會變得相當大,完全超出傾斜檢測應(yīng)用所能接受的范圍。要減少這類誤差,就應(yīng)當對失調(diào)和靈敏度進行校準,并使用校準后的輸出加速度來計算傾斜角。包括失調(diào)和靈敏度的影響后,加速度計輸出變化如下:
AOUT[g] = AOFF + ( 增益 × AACTUAL)
其中:
AOFF是失調(diào)誤差,單位為g.
Gain是加速度計的增益,理想值為1。
AACTUAL是作用于加速度計的實際加速度,理想值為g.
一種簡單的校準方法是假設(shè)增益為1并測量失調(diào)。經(jīng)過此校準之后,系統(tǒng)的精度即會限制為未校準的靈敏度誤差。這種簡單的校準方法可通過將目標軸置于1 g場中并測量輸出(大小等于失調(diào))來完成。然后,應(yīng)在處理信號之前從加速度計的輸出中減去該值。這種方法通常稱為無調(diào)頭或單點校準,因為器件的典型取向會將X和Y軸置于0 g場中。如果使用的是3軸器件,則應(yīng)針對Z軸包含至少一個調(diào)頭或第二個點。
多調(diào)頭校準技術(shù)
一種更加精確的校準方法是每個目標軸上取用兩個點。當某個軸處于+1 g和−1 g場中時,測得的輸出如下:
A+1g[g] = AOFF + (1 g × 增益)
A−1g [g] = AOFF + (−1 g × 增益)
其中,失調(diào)A,OFF以'g’表示。
利用這兩個點確定的失調(diào)和增益如下:
AOFF [g] = 0.5 × (A+1g[g] + A-1g[g])
增益 = [0.5 × (A+1g[g] + A-1g[g])]/ 1 g
其中,+1g 和−1g 測量結(jié)果A+1g[g]和A-1g[g]均以g表示。
由于測量目標軸時,正交軸都處于0 g場,因此這種校準方法還有助于將跨軸靈敏度影響降至最低。利用這些值,首先可以從加速度計測量結(jié)果中減去失調(diào),然后將所得結(jié)果除以增益。
AACTUAL[g] = (AOUT – AOFF) / 增益
以上公式在計算AOFF和增益時均假設(shè)加速度值A(chǔ)+1g和A-1g均以g表示。
如果加速度單位采用mg,AOFF的計算結(jié)果會保持不變,但增益的計算結(jié)果需要除以1000,以處理單位上的變化。
T測試結(jié)果
PCB安裝于能夠自由旋轉(zhuǎn)360°的板上,并用上述校準技術(shù)取得了一組數(shù)據(jù)(找出X和Y軸的+1 g和−1 g值來確定各個軸的失調(diào)和靈敏度)。通過調(diào)整PCB,使得Y軸輸出+1 g電平(~3.5 V),X軸輸出0 g電平(~2.5 V)。經(jīng)過校準后,將此方向視為0°。
然后,以1°為增量將PCB旋轉(zhuǎn)到±90°。圖9和圖10分別顯示了X和Y軸的誤差情況。
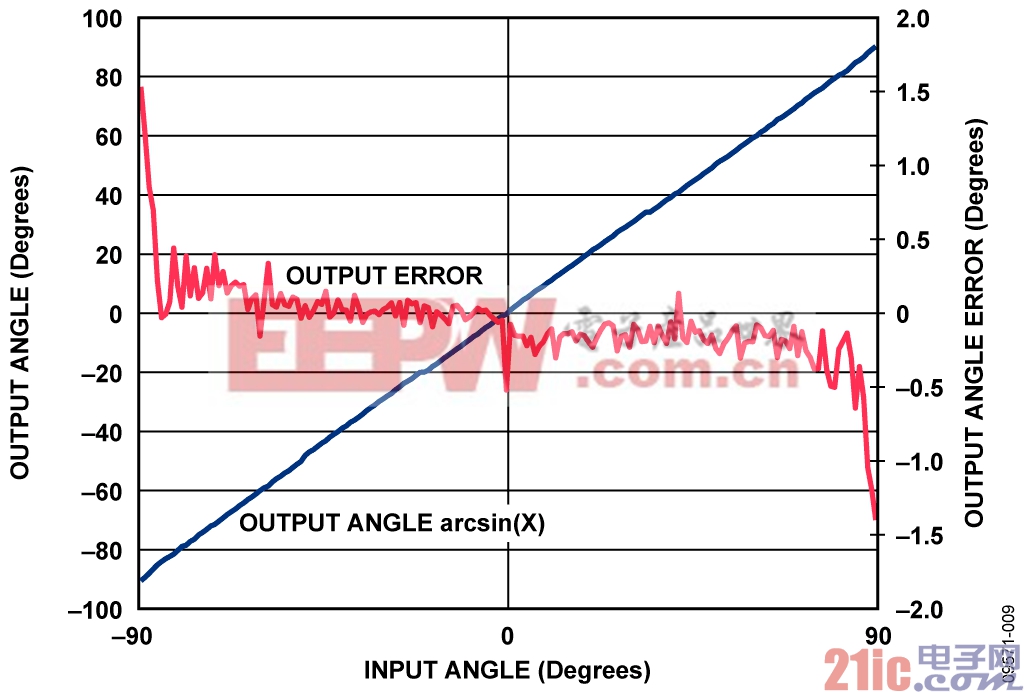
圖9. 輸入角度與輸出角度之間的關(guān)系(以arcsin (X)進行計算)
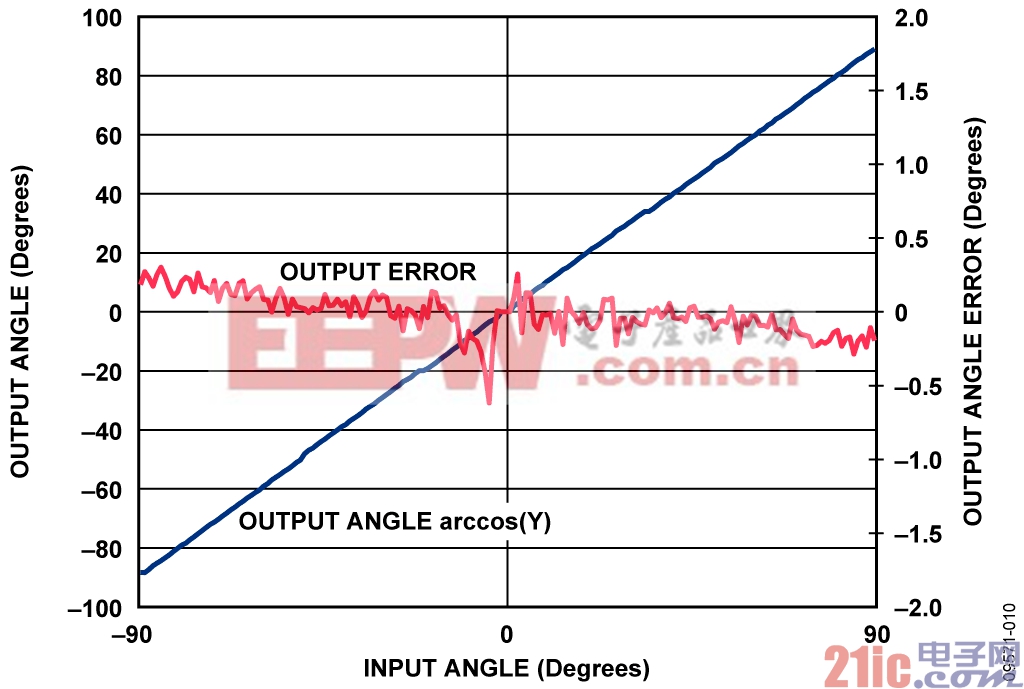
Figure 10. Input Angle vs. Output Angle Calculated as arcos(Y)

圖11. 輸入角度與輸出角度之間的關(guān)系(以arctan(X/Y)進行計算)
隨著各自讀數(shù)逐漸接近±1 g,兩個軸上的誤差會不斷增加。所對應(yīng)的板方向是X軸為±90°,Y軸則為0°。
圖11所示為根據(jù)X軸和Y軸的反正切值而得出的誤差情況。注意,兩個軸的比值誤差并沒有圖9和圖10所示的界限。
PCB布局考慮
在任何注重精度的電路中,必須仔細考慮電路板上的電源和接地回路布局。PCB應(yīng)盡可能隔離數(shù)字部分和模擬部分。本系統(tǒng)的PCB采用4層板堆疊而成,具有較大面積的接地層和電源層多邊形。有關(guān)布局布線和接地的詳細論述,請參考教程MT-031;有關(guān)去耦技術(shù)的信息,請參考教程MT-101。
AD7887的電源應(yīng)當用10 μF和0.1 μF電容去耦,以適當?shù)匾种圃肼暡p小紋波。這些電容應(yīng)盡可能靠近相應(yīng)器件,0.1 μF電容應(yīng)具有低ESR值。對于所有高頻去耦,建議使用陶瓷電容。
電源走線應(yīng)盡可能寬,以提供低阻抗路徑,并減小電源線路上的毛刺效應(yīng)。時鐘和其它快速開關(guān)的數(shù)字信號應(yīng)通過數(shù)字地將其與電路板上的其它器件屏蔽開。
有關(guān)本電路的完整設(shè)計支持包,請參閱www.analog.com/CN0189-DesignSupport。
常見變化
ADXL203的靈敏度和AD7887的增益都分別與電路中其各自的電源電壓成比例。整個電路可以配置成比率式的,方法是使用后接AD8605緩沖器的阻性分壓器從5 V電源獲得3.3 V VDD電源,具體如圖12所示。

圖12. 比率工作模式下AD7887的VDD電源
這種配置可以將電路對電源電壓變化的敏感性降至最低。
AD8505和AD8606分別是AD8608的單通道和雙通道版本,可以根據(jù)需要在該電路中使用。

DIY機械鍵盤相關(guān)社區(qū):機械鍵盤DIY
接地電阻相關(guān)文章:接地電阻測試方法
加速度計相關(guān)文章:加速度計原理









評論