基于TMS320F2812的數字頻率計的設計

2.2 系統的軟件設計
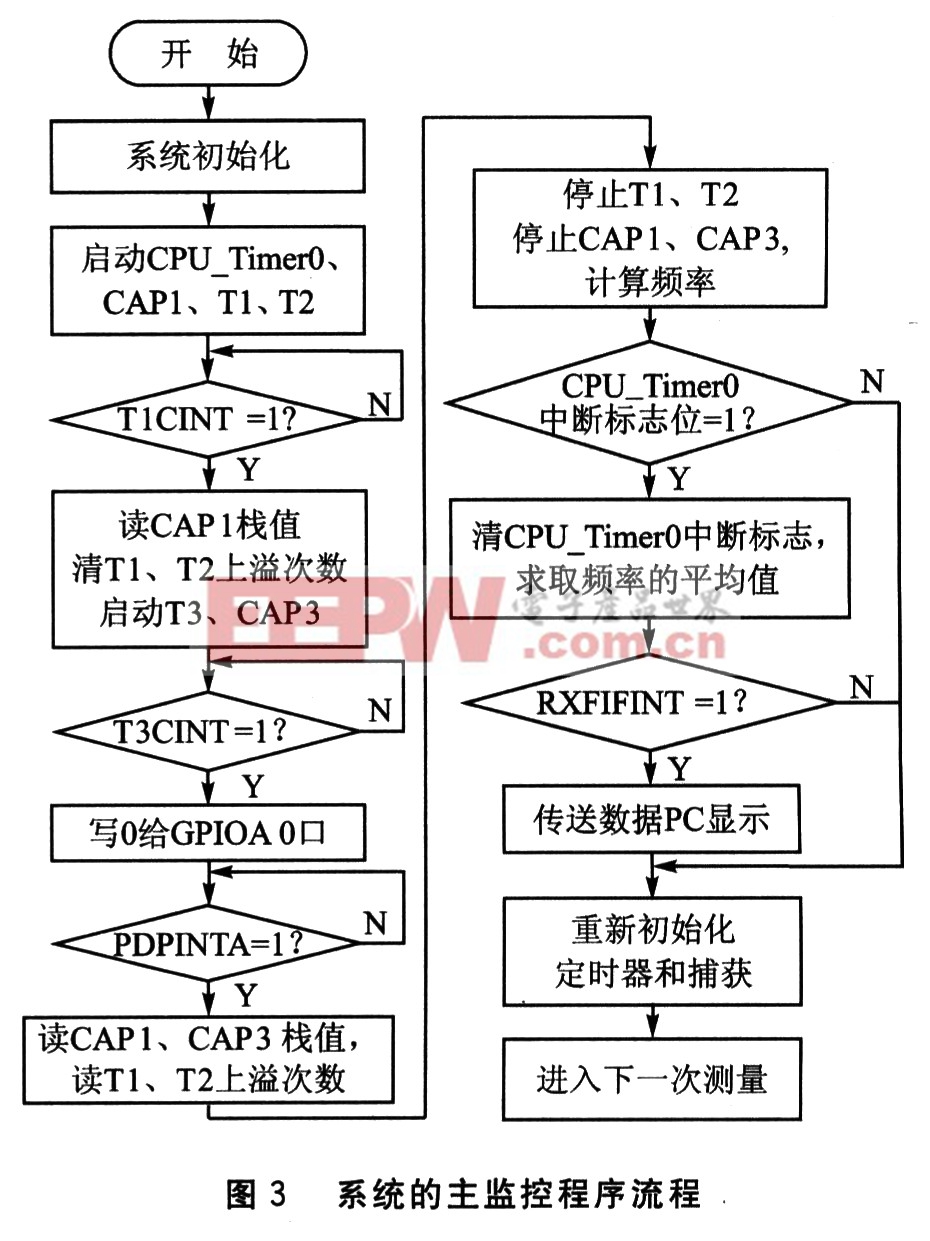
主監控程序是整個軟件系統的總調度程序,它控制著程序的有序運行。系統在上電或復位后,主程序先調用各模塊的初始化子程序,主要包括GPIO初始化、PIE初始化、EV初始化和SCI初始化。系統初始化完成之后,主程序啟動CPU_Timer0,使能T1、T2的上溢中斷,啟動CAPl,設置T1的比較值為1,等待T1CINT置位,開始測量頻率。為減小測量過程中產生的隨機誤差,所測結果均取平均值。利用CPU_Timer0產生一定的時間段(O.6s)。該時段結束后(CPU_TimerO中斷標志位置位),即對該段時間段內記錄的測量結果求均值。此時,如果查詢到上位機發出接收請求,則傳送相應數據至PC顯示。然,后,重新初始化定時器和捕獲單元,進入下一輪測量。主監控程序流程如圖3所示。本文引用地址:http://www.104case.com/article/188998.htm
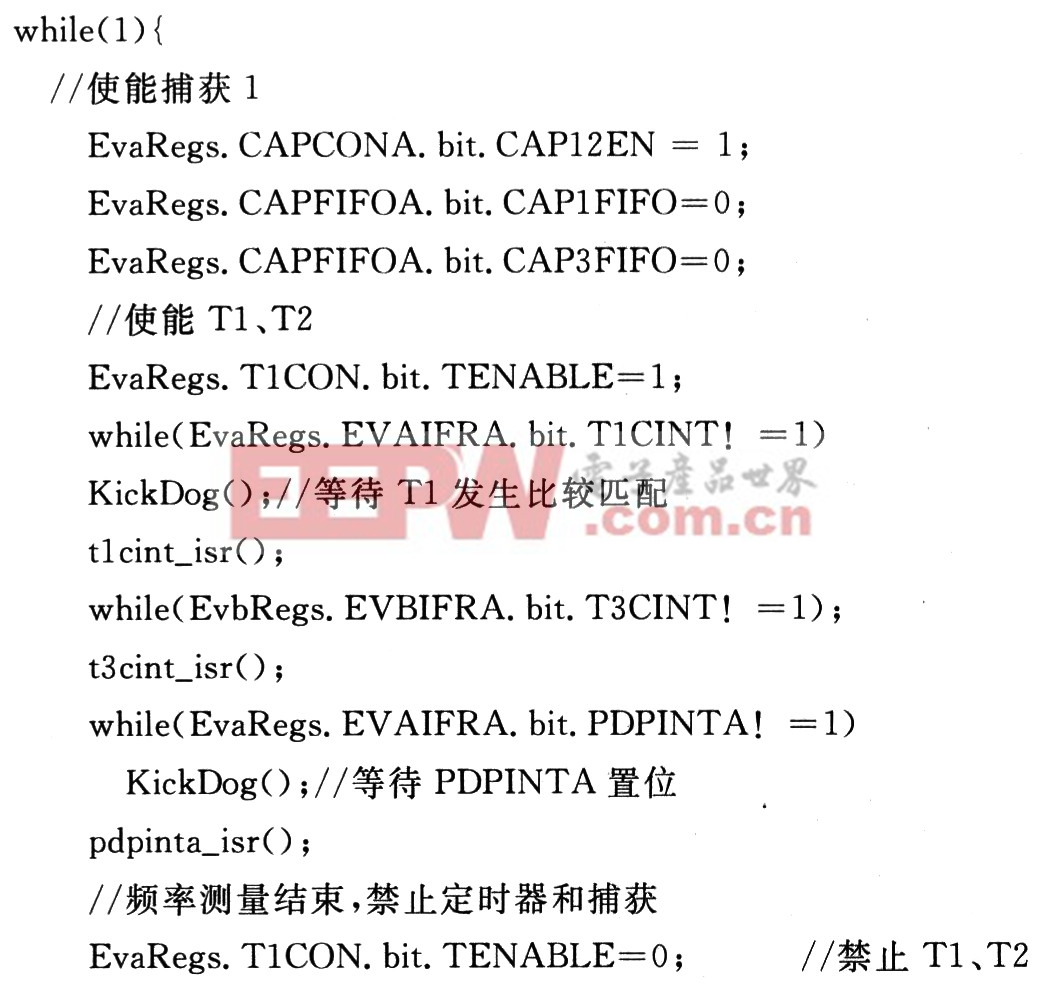
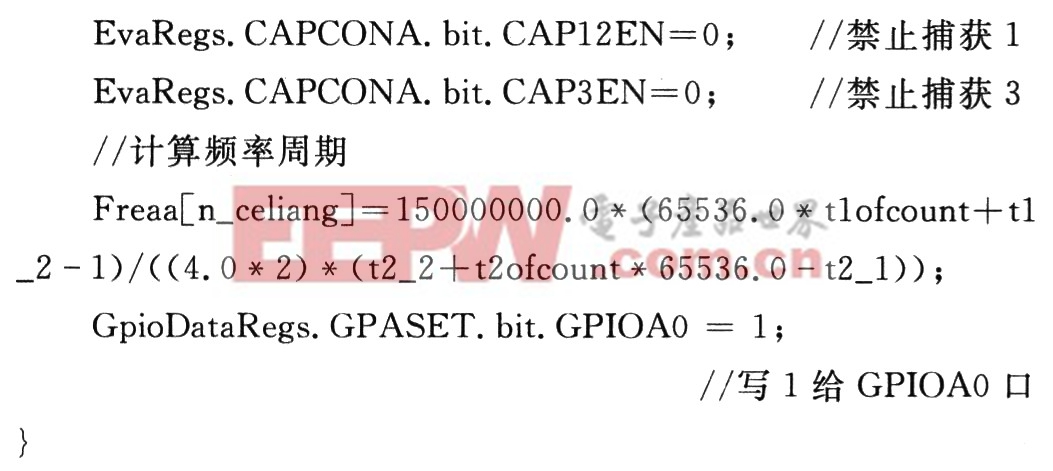
測頻的部分源代碼如下:

評論