基于DSP的磁流變減振模糊控制系統設計

3 軟件設計
(1)主程序。
系統主程序主要完成對系統各個模塊的初始化、調入模糊控制查詢表,其中初始化主要完成設置系統硬件及軟件所需的初始參數和初始的狀態,以保證系統的各個模塊能正常工作。程序首先禁止所有中斷,以防止程序在系統未正確初始化的情況下調用了中斷服務子程序。初始化結束后將事先離線計算所得的模糊控制查詢表存入數據存儲器,供執行控制算法時查表使用,模糊控制查詢表也可在程序開始時存入數據存儲器,最終輸出控制量。
(2)數據采集。
先設置定時器控制器GPTCON、控制寄存器1、控制寄存器2,然后進入A/D中斷服務子程序,由EVA模塊的定時器1的周期中斷觸發A/D轉換。在 A/D中斷服務子程序中,首先讀取A/D轉換結果,并將結果存放于數據存儲區的指定區域,供模糊控制算法查表使用,然后執行控制算法程序。
(3)模糊控制規則表。
由實驗測試知,減振系統相對位移為[-5,5]cm,加速度值為[-4,4]m/s2,輸出磁流變阻尼器的工作電流取為[0,2]A。設定模糊系統輸入和輸出數值的論域都為[-1,1],對車身垂直方向加速度及其變化率、減振器的輸入電流進行正則化處理,使其論域均為[-1,1]。
設車身垂直方向加速度為A、垂直方向加速度變化率為ΔA、減振器輸入電流為I,正則化處理方法為:AP=K1AΔAP=K2ΔAPI=K0IP
式中,K1、K2、K3為相應的量化因子。
對A、AP定義 7個模糊語言值:負大、負中、負小、零、正小、正中、正大,分別用 NB、NM、NS、ZE、PS、PM、PB表示,
IP的7個模糊語言值為:零、小、小中、中、小大、中大、大,分別用 NB、NM、NS、ZE、PS、PM、PB表示。
根據參考文獻和實際操作經驗,得出響應的控制策略,本文減振控制系統的控制規則共有49條,建立如表1所示的模糊控制狀態表。
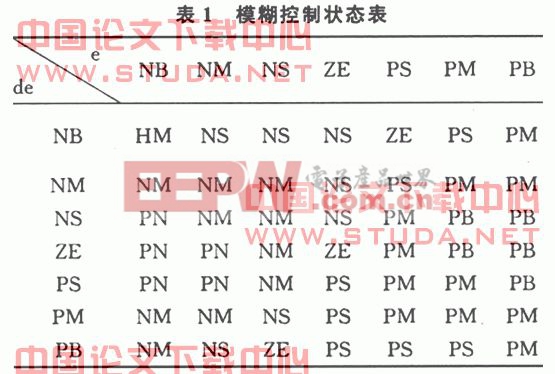
模糊推理的結果是模糊量,不能直接控制被控對象,需要將模糊量轉化為精確值。本文采用重心法實現去模糊化。







評論