一種新算法的干擾信號偵測、追蹤與定位系統

在平面直角坐標系XOY中,令干擾源C點的坐標為(X,Y),則直線AC的斜率為:

由上可知,坐標系XOY中,求解C點的坐標(X,Y)。令C點的經度坐標為CJ,緯度坐標為CW,則最終C點的坐標為(AJ+X,AW+Y)。干擾源C點的坐標表達式中各項參數,均可由已知條件和測量結果獲得,因此該算法完成干擾源的追蹤與定位。
3.3 干擾源C點與偵測點A和B的距離
已知兩點的經度和緯度,利用式(3)求解出這兩點之間的距離。通過計算得出主機偵測點A和干擾源C的經度和緯度坐標分別是(AJ,AW)和(AJ+x,AW+y),則A和C的實際距離dAC可表示為:本文引用地址:http://www.104case.com/article/188682.htm
![]()
4 算法應用
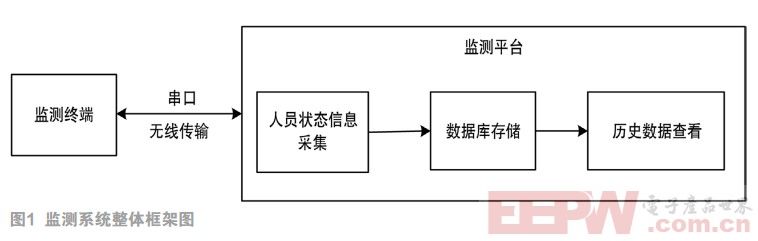
WJ-1型電磁干擾測量儀是基于該新算法而設計的,已應用于北京奧運會。該電磁干擾測量儀不僅能夠對干擾信號進行全方位偵測、追蹤、定位、計算出其移動中干擾信號運動軌跡和尋找到干擾源最佳路徑,且還大大簡化原有抗干擾系統的設備的復雜度。而該設備中基于此算法由STCl2C5410AD單片機控制的自旋式超寬帶方向天線很好地解決抗干擾,簡化系統復雜度,節約成本。WJ-1型抗干擾偵測系統工作流程如圖3所示。

整個系統分為主機和從機兩大部分,主機和從機配合工作,掃描干擾信號的自旋式超寬帶方向天線,計算模擬信號處理A/D轉換在主從機的各自數值。在從機中干擾信號經頻譜儀分析處理后,得到的各項參數傳輸給主機,有CPU統一處理。中角度傳感器主要用于記錄自旋式超寬帶方向天線的旋轉角度,STC單片機用于控制角度傳感器和步進電機,其中步進電機轉動其精度達0.05°/步,即平面方向精度可以達0.05°/步。CPU綜合主機、從機中對干擾信號分析的各項參數和地理坐標信息,經計算得到干擾源的經度、緯度,GPS導航后,顯示尋找干擾源的最佳路徑,同時也可在電子地圖上顯示干擾源周圍的地形地貌特征。
5 結語
提供了一種極優算法,通過把復雜的干擾信號追蹤與定位問題抽象到數學模型中,大大簡化信號求解過程中的計算量,同時也簡化程序軟件設計。





評論