地下水動態水位信號采集系統的設計與實現

3.1 工作過程簡述
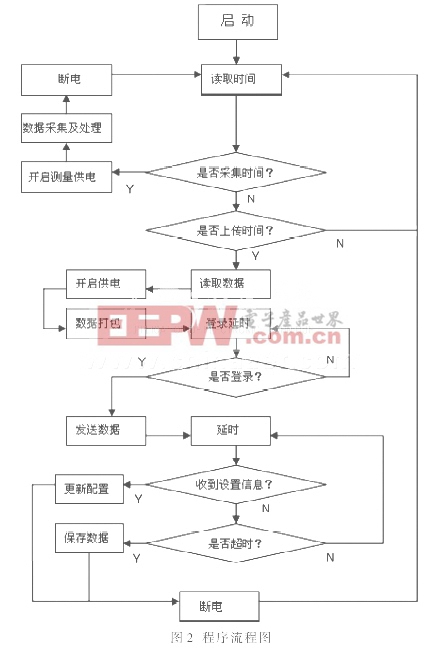
在設備開啟后,單片機會執行各功能模塊的初始化程序,之后從時鐘日歷芯片中讀取當前的日期和時間,之后判斷此時刻是否超過設定的測量時刻,如果超過測量時刻則進入測量狀態,此時單片機會開啟對測量電路的供電,延時等待傳感器穩定后,會連續采集100次數據存入RAM中。采集后測量電路供電將關閉,經過中值濾波法求得最終保留的數據,再將數據保存到單片機片上的EEPROM中。當程序判斷當前時間超過了上傳的時刻,則會開啟GSM模塊,等待GSM模塊入網后先接收供電然后將要發送的數據按照AT指令打包,并以短信的形式發給目的設備。如果數據發送超時,單片機將會把滯留的數據包存放在單片機內部的EEPROM中等待下一次上傳。最后關閉GSM模塊又回到循環時間的查詢狀態。
數據采集頻率為1日2次,在測量時刻到來時,CPU啟用升壓電路為壓力傳感器和信號調理電路供電,啟動A/D轉換器供電,采集壓力傳感器數據和電池電壓數據后,關閉供電電路,進行數據處理,測量結果保存在單片機內部的EEPROM中。可通過命令修改數據上傳時間。為了節省數據總線上的功耗,時間讀取不是實時的,用定時器中斷服務程序進行讀取,每分鐘讀取1次。上傳的數據總是前一天測得的數據。
在程序運行的整個過程單片機內部的看門狗計數器被一直啟用,用于監視采集器的正常工作,如果死機或程序執行混亂,看門狗定時器會使單片機復位。
3.2程序流程圖
程序流程圖如圖2所示本文引用地址:http://www.104case.com/article/188569.htm
3.3 協議設計
AT指令集是 ETSI (歐洲通信技術委員會 ) 發布的一種移動平臺與設備終端的通用接口指令 , 其中包含對SMS的控制[7]。采集器向上位機系統傳輸數據的內容包括功能碼、日期時間和采集到的數據。每一字節數據為ASCII碼形式。協議包括2個部分:
(1)采集器上傳報文的格式(除去AT指令):DT(數據說明)_上傳時間_測量日期_時間1_水深(單位:m)_時間2_水深(單位:m)#(結束),以一個數據示例的文本形式為:DT_2008/11/09/16:00_2008/11/08_02:00_23.40_14:00_23.10_16:00#。此數據的內容是上傳時間為2008年11月9日16:00,2008年11月8日,2:00時水深23.40m14:00時,水深23.10m。
(2)上位機系統對采集器發送命令的報文的格式(除去AT指令) :ST(設置說明)_設置日期及時間_時間1_水深(單位:m)_時間2_水深(單位:m)_上傳時間#(結束),以文本的形式表示則為:ST_2008/11/08/09:00_05:00_20:00_14:00#。此數據的內容是時間設置為2008年11月8日9點,2次采集時間設置為5:00和20:00,上傳時間設為14:00。
在發送這條短信后采集器下一次發送短信的目的地址自動調整為該地址。
4實際測試
4.1數據傳輸
在數據傳輸的測試中調整程序,使每隔半小時就上傳一次數據,中途隨機發送對采集器設置的信息,設置的上傳時間忽略不計,表1所列是接收450個短信息中的一部分。

表中,346和347號數據表明在2008/11/09/14:00時GSM模塊發生了入網超時,信息發送不成功,在14:30時原先發送失敗的數據被重新成功發送。
在450個數據傳輸測試的過程中出現入網超時率為0.67%,數據丟失率為0。進行過50次設置,設置失敗率為8%,但是后期延長超時時間后,測試100次,設置失敗率降為2%。
4.2能耗測試
(1)靜態等候:單片機工作在32.768 kHz時鐘下電流消耗小于20μA,測量電路和GPRS模塊處于斷電狀態,供電推挽輸出為低電平時MOS管的漏電流小于10μA,時鐘日歷芯片獨立供電基本可以連續工作8年以上,將不計入功耗分析。每天24h運行,一天的能耗共計720 μAh。
(2)測量: LT1613消耗1 mA的自身工作電流,傳感器工作時消耗的電流為10 mA(12V),實測5 V供電時從電池組吸取25 mA的電流,電壓基準源消耗1 mA,A/D轉換器工作時消耗3 mA。測量的整個過程小于300 ms,每次測量共計消耗2.4 μAh的電能。
(3)數據上傳:GSM模塊在發送數據時電流為500 mA,接收數據時為20 mA,靜態時為2.5 mA, GSM模塊獨立測試過程中,一次數據上傳過程小于20 s,大約需要消耗200 μAh的電能。
綜上所述,一天測量2次上傳1次的工作過程共消耗0.925 mAh的電能。如果用電量為800 mAh的堿性電池可連續工作800天以上。但是由于電池保質期和電池本身的自放電,再加上電量低水平時的內阻,可以保證至少一年正常工作。
此采集終端靜全天正常工作的耗電量為0.925 μAh,采用4節AA型堿性電池可維持一年以上連續正常工作,測量誤差小于0.16%,與上位機系統通信協議接口簡單、可靠性高。能夠較好地滿足地下水動態監測系統的下位機系統的需要。


評論