基于ADS8364的數據采集系統設計

由于所選的TMS320F2812 DSP 內部含有CAN控制器,只需加1個CAN收發器芯片即可實現CAN總線網絡。CAN通信模塊的功能是將采集系統的采樣結果及運行參數實時上傳到總線,提供給上位機存儲及處理。
3 系統軟件設計
軟件程序運行于硬件平臺之上,實現采樣系統的采集、濾波以及后期處理,是測量裝置的靈魂。本裝置軟件設計主要由主程序和子程序組成。為了實現準確、快速、實時的測量功能,采用C 語言和匯編語言混合編程。
3.1 DSP 程序設計
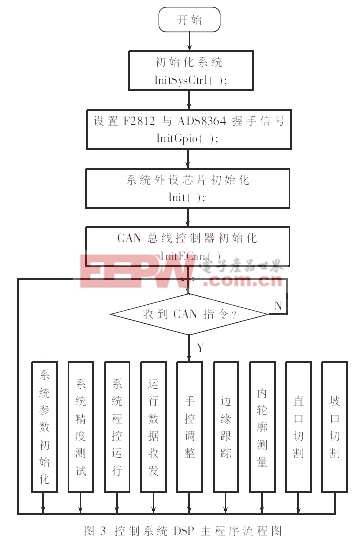
DSP編程的主要任務是初始化、管理板上的資源和實現前端數字信號處理的算法。這里以TI公司提供的功能強大的CCS(Code Composer Studio) 為集成開發環境。系統上電復位后, 首先完成F2812 自身的初始化, 包括配置RAM塊、設置I/O 模式、定時器模式、中斷等; 然后程序進入循環狀態,等待上位機CAN指令的到來。在F2812的程序存儲器中存儲常用的數字信號處理算法,F2812在收到上位機通過CAN總線發送的控制指令后,在中斷函數中選擇某種處理算法,同時向CPLD發出動作命令,控制A/D轉換模塊完成信號的采集并將采集到的數據存入SRAM中。當采樣點數達到設定點數時,DSP程序實現對部分采樣數據的讀取,在主循環程序中根據上位機選定的處理算法完成數據的前端處理,然后將數據打包,通過CAN總線傳輸給上位機。F2812主程序流程圖如圖3所示。
3.2 數據采集子程序流程
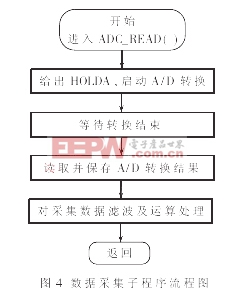
數據采集子程序流程如圖4所示。首先,在外部時鐘信號的作用下,F2812要提供ADS8364所需的HOLD保持信號,啟動轉換。待ADS8364轉換完成時,產生EOC中斷信號給F2812,F2812接收到EOC信號后,對所需的通道結果寄存器進行讀操作,只要保證CS和RD同時為低50 ns以上,就可將轉換完的數據讀出。由于測量系統采樣時刻由數控系統運動狀態來決定,因此,對于采樣時刻的確定要在測量機構運動過程中的空閑時間進行。保證空閑時間遠大于2 ms并且保證采樣時刻對應其他各軸的坐標反映了測量目標的真實形狀數據。由于ADS8364的轉換速度很快,在啟動A/D轉換之后,只需等待5 μs即可讀取轉換結果,因此可采用等待方式,等待時間大于5 μs即可讀取數據。在實際工作時,智能測量節點將采集到的數據發送到中心處理主機進行存儲、處理。中心處理主機采用PC104總線的嵌人式CPU,通過CAN接口卡PCI5121和智能節點通信。
本文將TMS320F2812與ADS8364相結合,設計了一套數據采集系統。該系統采用CAN總線與上位機通信, 充分發揮了CAN2.0方便、快捷的優點。考慮到對實時性的要求,將某些特定的數字信號處理算法放到數據采集處理卡上由DSP快速完成。該系統采集精度高, 速度快,并且可同時采集多路信號。該數據采集處理系統已經用于大型曲面鋼板的結構參數測量中,實踐證明, 運行穩定可靠。











評論