基于CAN總線的智能饋線終端的研究

開關量輸入輸出控制部分
F040共有P0~P7共8組64個端口,且每個端口都是可位尋址的。有了這樣充足的端口,我們可以很方便地連接相應的開關量而不需外擴端口。端口并不直接與相關的開關直接相連,而是通過相應的光耦,這樣做的目的是為了防止電網串入的瞬時干擾。F040定時對開入開關進行檢測,并將相應的值經由CAN總線傳入配電子站,即可實現遙信功能。接收配電子站發出的開出開關的控制信號控制相應開關的開合,實現相應的遙控功能。
測頻部分
利用F040內部的硬件資源我們可以很方便地對交流工頻信號進行測量。具體實現方法為取一路交流電信號,經過相應的限幅處理后,送入F040片內的電壓比較器后,得到方波信號。F040片內的電壓比較器可以調整回差電壓,通過對回差電壓的調整即可實現遲滯電壓的比較功能,用于消除輸入信號在過零點可能出現的抖動現象。電壓比較器輸出的方波信號連接到F040的片內PCA(可編程計數器陣列)的一個捕獲/比較單元,捕獲/比較單元工作在上跳沿捕獲方式,每次檢測到上跳沿將引起一個中斷,同時產生一次捕獲,將此時PCA計數器的值送入該捕獲/比較單元的捕獲寄存器中。我們在中斷服務子程序計算兩次捕獲的PCA0計數值之差即對應交流工頻的周期。PCA計數器選擇與定時采樣計數器相同的時基,所以只需將此計數值除以采樣次數就可作為定時采樣計數器的重裝值用于下一次交流采樣。
CAN總線通訊部分
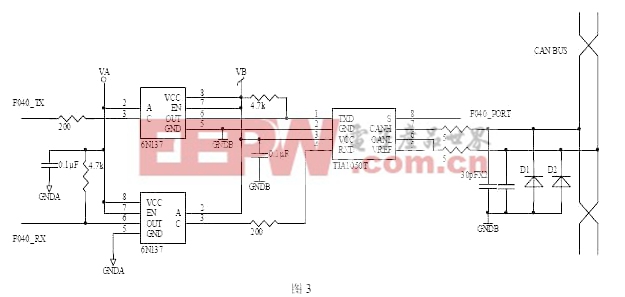
F040中內置CAN總線協議控制器,只要外接總線驅動芯片和適當的抗干擾電路就可以很方便地建立一個CAN總線智能測控節點。本設計中采用PHILIP公司的TJA1050T CAN總線驅動器。CAN總線通信硬件原理圖如圖3所示。
圖中F040 的CAN信號接收引腳RX和發送引腳TX并不直接連接到TJA1050T的RXD和TXD端,而是經由高速光耦6N137進行連接,這樣做的目的是為了實現CAN總線各節點的電氣隔離。為了實現真正意義上完全的電氣隔離,光耦部分的VA和VB必須通過DC-DC模塊或者是帶有多個隔離輸出的開關電源模塊進行隔離。為防止過流沖擊,TJA1050T的CANH和CANL引腳各通過一個5Ω的電阻連接到總線上。并在CANH和CANL腳與地之間并聯2個30P的電容, 用于濾除總線上高頻干擾。而防雷擊管D1和D2可以起到發生瞬變干擾時的保護作用。[1]
TJA1050T的8腳連接到F040的一個端口用于模式選擇,TJA1050T有兩種工作模式用于選擇,高速模式和靜音模式。TJA1050T正常工作在高速模式,而在靜音模式下,TJA1050T的發送器被禁能,執行只聽功能,可用于防止由于CAN控制器失控而造成的網絡阻塞。本文引用地址:http://www.104case.com/article/188529.htm
3 智能饋線終端的軟件設計
鑒于該裝置功能復雜,軟件編制方法采用 C51和匯編混合編程,首先在系統中移植μC/OS-II,然后在此基礎上分別編制各個相關的任務,通過這樣可以大大提高整個系統的實時性,可靠性,降低程序設計的難度,提高程序的可維護性。軟件部分主要包括兩大部分:一是μC/OS-II實時內核的移植,二是各相關任務的編制。
μC/OS-II在 C8051F單片機上的移植
μC/OS-II是一個完整的,可移植,固化、裁減的占先式實時多任務內核。μC/OS-II大部分是用ANSI C 進行編制的,只有少部分與CPU密切相關的部分是用匯編語言編寫的,至今UC/OS-II已在超過40種不同架構的微處理器上運行。[3]
μCOS-II在C8051F上的移植主要是三個與CPU架構有關的文件進行重寫,它們分別是匯編文件OS_CPU_A.ASM、C語言文件 OS_CPU_C.C和頭文件OS_CPU.H。
另外要注意的一個問題是函數的可重入性問題,由于單片機內部堆棧空間有限,C51為函數調用提供的是一種壓縮棧,每個函數被給定一個空間用于存放局部變量。函數中的每個變量都放在這個空間的固定位置,當遞歸調用這個函數時,會導致變量被覆蓋。為保證所有函數的可重入性,必須使用reentrant關鍵字指定所有相關的系統函數。
相關任務的編制
饋線終端主要包括以下幾個任務,它們分別是A/D定時采樣任務,該任務具有最高的優先級,該任務主要完成數據的采集、采樣通道的切換等功能。CAN通信任務,該任務具有第二高的優先級,該任務主要完成采樣數據及相關報警信號的上傳以及配電子站發過來的相應命令報文的解析處理。電參數計算任務,該任務具有第三高優先級,該任務主要完成電力參數的計算功能。LCD顯示子任務,該任務主要完成相關電力參數在LCD屏上的顯示,該任務具有最低的優先級。
CAN總線通信報文的格式
CAN總線通信采用具有29位標識符的擴展幀,標識符的內容包括當前信號的種類代碼,(包括報警信號,電參數信號,故障錄波信號,開關量參數信號以及控制信號等), 配電子站的地址,FTU的地址等。配電子站發送控制信號的格式為,使用數據域的第一個字節判斷控制信號的種類,控制信號的種類主要有開出開關量的控制信號,請求獲取開入開關量的控制信號,請求實時獲取電參數的控制信號,以及對時信號等,根據控制信號的種類確定其它幾個數據的意義,例如如果是對時信號,則后6個字節依次為當前時間的年,月,日,時,分,秒。
4 結語
運用CAN總線技術開發的智能饋線終端單元,可以極大提高配電自動化系統的可靠性,實時性,系統性價比高,安裝維護簡潔方便,具有較廣闊的應用前景。











評論