基于HLA的自行高炮CGF的研究與設計

高炮攻防對抗過程可看成是由一系列離散一連續事件和活動組成,該CGF系統主要由CGF操作員接口和5大模型組成,即機動模型、火控模型、毀殲效能評判模型、數據庫模型和智能決策模型。
(1)機動模型。主要包括進攻過程中單炮機動模型,分隊作戰的路徑規劃模型。
(2)火控運用模型。主要包括目標探測模型,目標選擇模型,瞄準射擊模型,射道分布模型。
(3)評判模型。主要包括紅藍雙方的毀傷結果,并進行相關的數據統計分析。
(4)數據庫模型。主要包括雙方參戰的性能參數,紅藍方的戰術機制,高炮的位置、配置地域等情況。
(5)智能決策模型。智能決策模型設計是建模的關鍵環節,主要采用人工智能技術來進行智能決策模型的建立。
3 高炮CGF智能決策模型的實現方案
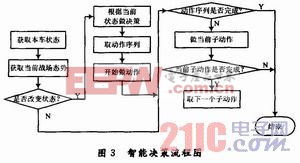
CGF的研究重點在于實體行為,尤其是智能行為的實現。目前,實現CGF的智能行為主要采用人工智能技術。高炮CGF行為模型中的智能決策模塊將由物理模型傳來的信息根據知識庫進行決策,模塊內部由2大部分組成:接口模塊和決策模塊。其中接口模塊由接收屬性模塊、發布交互模塊組成。決策模塊分為決策器模塊、數據庫管理模塊、戰術控制規則數據庫和歷史信息庫模塊。決策模塊采用人工神經網絡的智能算法實現,決策過程為:決策機制接收當前環境的狀態信息,結合炮車的自身狀態,參照任務目標做出決策,產生動作控制信息。在高炮CGF系統中,先用模糊邏輯的方法對當前態勢進行分類,判斷所采用戰術規則的類別,再根據規則庫實施戰術決策,并對當選戰術進行動作規劃,再將決策結果作為控制信息傳回給物理模型實體。在智能決策過程中,需要考慮當前狀態數據與規則條件的匹配、規則的搜索、沖突消解、匹配失敗的處理等問題,同時還要考慮智能決策的實時性問題。實時決策是指在決策過程中,當某規則最適合當前態勢時,能夠迅速啟用該規則,充分抓住戰機;而當所有規則都不適合當前態勢時,要盡快結束本次決策過程,以便隨時迅速進入下一輪決策,決策流程如圖3所示。
4 基于HLA的高炮CGF系統設計
基于HLA的高炮武器系統模擬訓練平臺的設計是聯邦的開發過程,高炮CGF仿真子系統的設計則是聯邦成員的開發過程。按照聯邦成員的開發過程,應對高炮作戰過程、涉及的事件、構建的模型、工作時序、輸入輸出信息及與其他仿真成員組之間的關系等進行分析。
4.1 高炮CGF仿真子系統與其他聯邦成員的關系
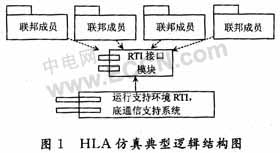
由高炮武器系統聯邦結構圖(圖1)可知,高炮CGF仿真子系統(紅方成員)與其他子系統(成員組)之間是通過HLA接口與RTI連接,由RTI實現成員(對象)之間的數據交換和控制。
4.2 高炮火控單元射擊指揮過程分析
高炮火控單元的射擊指揮過程,即火控單元完成對空中目標射擊的全過程可用下列事件來表征:目標搜索控制、目標跟蹤處理、目標威脅評估及排序、發生決策、火控分配、發射和殺傷效果評估及火控轉移。
4.3 信息公布訂購關系
高炮CGF仿真子系統要完成防空作戰過程仿真,必須與其他仿真成員之間發生信息交互,交互的信息主要有:
(1)與導演臺成員組之間訂購的交互類包括:啟動仿真運行、暫停和結束的控制信息;顯示方式、內容的控制信息;武器系統性能參數信息。
(2)公布的交互類包括:防空火控單元的類型、數量及部署位置(坐標)信息;炮彈的飛行軌跡數據;防空作戰結果數據等。
(3)與戰場環境成員組之間訂購的交互類包括:被保衛陣地的類型、編號、坐標等信息;電子干擾手段、樣式信息等。
(4)公布的交互類包括:防空火控單元的類型、數量及部署位置信息;預警雷達類型、數量、及部署位置信息等。
(5)與藍方成員組之間訂購的交互類包括:空中目標的航跡數據(批次、架次、坐標、時間等)信息;攻擊機投放的炸彈航跡數據信息等。
(6)公布的交互類包括:炮彈的飛行軌跡數據;火控單元陣地毀傷信息。
高炮CGF作戰仿真系統的工作流程圖如圖4所示。

評論