高速鏈路時(shí)鐘抖動(dòng)規(guī)范基礎(chǔ)知識(shí)

本文介紹時(shí)鐘抖動(dòng)對(duì)高速鏈路性能的影響。我們將重點(diǎn)介紹抖動(dòng)預(yù)算基礎(chǔ)。
本文引用地址:http://www.104case.com/article/187435.htm用于在更遠(yuǎn)距離對(duì)日益增長的海量數(shù)據(jù)進(jìn)行傳輸?shù)囊恍?biāo)準(zhǔn)不斷出現(xiàn)。來自各行業(yè)的工程師們組成了各種委員會(huì)和標(biāo)準(zhǔn)機(jī)構(gòu),根據(jù)其開發(fā)標(biāo)準(zhǔn)的目標(biāo)(數(shù)據(jù)吞吐量和通信距離)確定抖動(dòng)預(yù)算;同時(shí)還要考慮到組成通信鏈路的模塊的局限性。
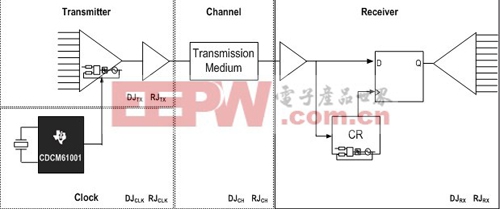
圖1 通信鏈路—抖動(dòng)組件
圖1顯示了集成有一個(gè)嵌入式時(shí)鐘的典型高速通信鏈路。每個(gè)子系統(tǒng)(時(shí)鐘、發(fā)送器、通道和接收機(jī))都會(huì)對(duì)整體抖動(dòng)預(yù)算的增加產(chǎn)生影響。子系統(tǒng)抖動(dòng)包括一個(gè)決定性 (DJ) 組件和一個(gè)隨機(jī)組件 (RJ),如圖1所示。為了實(shí)現(xiàn)可接受的通信效果,必須滿足下列條件:
 方程式 1
方程式 1
其中:TJSYS是總抖動(dòng),而1UI為1個(gè)單位時(shí)間間隔(1比特時(shí)間)
總抖動(dòng) (TJ) 包括每個(gè)子系統(tǒng)決定性抖動(dòng)和隨機(jī)抖動(dòng)的和。由于隨機(jī)抖動(dòng)自身的屬性,進(jìn)行這種求和時(shí)需要特別注意。隨機(jī)抖動(dòng)呈現(xiàn)高斯(隨機(jī))分布,并且無邊界。因此,隨機(jī)抖動(dòng)可表示為一個(gè)RMS值,并且在規(guī)定測(cè)量/整合帶寬范圍內(nèi)對(duì)其進(jìn)行估算。例如,圖1所示接收機(jī)的抖動(dòng)測(cè)量帶寬便為f2 - f1(參見圖2)。這是因?yàn)榻邮諜C(jī)鎖相環(huán)路 (PLL) 追蹤f1以下的抖動(dòng)(從而排斥它),而發(fā)射PLL的頻率上限為f2。從接收機(jī)的角度來看,使鏈路性能降低的隨機(jī)抖動(dòng)降至這些限制之間。
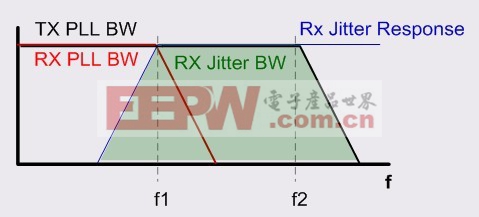
圖2 高速通信鏈路—隨機(jī)抖動(dòng)測(cè)量帶寬
由于隨機(jī)抖動(dòng)是隨機(jī)過程產(chǎn)生的結(jié)果,系統(tǒng)總隨機(jī)抖動(dòng)的計(jì)算需要進(jìn)行方和根 (RSS) 計(jì)算,如方程式2所示:
 方程式 2
方程式 2
決定性抖動(dòng)源和的計(jì)算很簡單:
 方程式 3
方程式 3
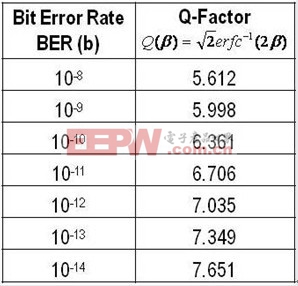
最后,可對(duì)系統(tǒng)總抖動(dòng)進(jìn)行估算,由此可以實(shí)現(xiàn)鏈路預(yù)算;但是,還需要做更多的工作。這種計(jì)算涉及統(tǒng)計(jì)數(shù)學(xué)。需要用到一種被稱之為Q因數(shù)的參數(shù)(參見表 1)。Q因數(shù)的大小具體取決于誤碼率 (BER),同時(shí)還要根據(jù)鏈路性能/可靠性目標(biāo)來選擇。由于隨機(jī)抖動(dòng)的無邊界屬性,(最終)會(huì)出現(xiàn)誤碼。例如,10-8的BER意味著,每發(fā)送100,000,000 比特便會(huì)有一個(gè)比特被錯(cuò)誤解釋。現(xiàn)代的通信系統(tǒng)通常會(huì)要求一個(gè)達(dá)到或者超過10-12以上的BER。
系統(tǒng)總抖動(dòng)(以及鏈路預(yù)算)可使用方程式4計(jì)算得到:
 方程式 4
方程式 4
例如,10-14的BER時(shí),總抖動(dòng)為:
 方程式 5
方程式 5
表1 Q因數(shù)和誤碼率
本文討論了構(gòu)成總抖動(dòng)預(yù)算的一些參數(shù)。

評(píng)論