冗余CAN總線遠程數據采集系統設計與研究

1 引 言
本文引用地址:http://www.104case.com/article/186947.htm隨著計算機應用技術在工業控制領域的推廣及其自身的革新,以工業現場總線為應用背景的網絡控制系統在業界被廣泛使用和推廣。CAN總線作為工業現場串行總線的一種,因其具有較高的位速率和極高的抗電磁干擾能力,能偵測和處理產生的任何總線錯誤,并且具有高可靠性、實時性和靈活性,在監測和控制系統中倍受青睞。然而傳統的工業現場遠程數據采集系統主要通過單總線傳輸,往往因為總線通訊故障而影響系統工作效率,不利于遠程監測和控制,在某些控制領域里甚至存在很大危險,造成難以維護,系統監測數據不連續、難以管理和監測效率低下等缺點。
通過將冗余CAN總線技術應用到現場遠程數據采集傳輸系統中,采用嵌入式控制方式很好地解決了上述問題。
2 遠程數據采集系統的組成
考慮到工業現場的環境比較復雜,為提高系統工作的可靠性和抗干擾能力,本系統設計采用嵌入式智能系統作為數據采集器,以PC104系統作為嵌人式信息處理單元,通過冗余CAN總線接口開放式互聯的結構組成采集系統。系統的組成框圖如圖l所示。系統由信息處理單元、遠程嵌人式采集器、狀態顯示、外圍控制和維護接口等輔助接口單元組成,嵌人式信息處理單元和遠程數據采集器配置雙CAN總線接口。
嵌入式信息處理單元是該系統的主控單元,是系統信息處理的核心。它主要負責信息的采集和管理,并將采集信息處理后定期送往數據存儲單元和數據顯示單元,同時解析來自維護接口的用戶指令,根據指令要求執行相應的采集器維護命令和主控單元本身的日常維護。遠程數據采集器周期接收信息處理的采集指令,周期性地將采集數據發給信息處理。系統通過高速網絡接口實現了與其他網絡進行數據交換,可實現監控數據的共享和信息綜合。維護接口可提供無線指令響應服務和現場指令響應服務,以滿足本地和遠程的系統維護。
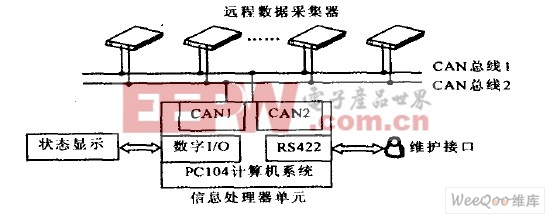
圖1 系統組成示意圖
3 遠程數據采集系統的實現
本系統的硬件設計重點在于信息處理單元和遠程數據采集器的設計。
3.1 信息處理單元設計
遠程數據采集系統實現的關鍵是對現場傳感器數據的實時采集、本地和遠程命令的接收與采集信息的轉換和處理。信息處理單元對數據采集器進行正常的運行監視、操作、測量記錄和統計分析、故障運行的監視、報警和事件順序記錄與運行操作,緊急控制、維修狀態信息處理等功能。
信息處理單元采用x86架構的PC104計算機系統和CAN總線接口卡組成。盛博SCM一7020B是一款“all~in—one”PC/104 CPU模塊¨ ,它在板上集成了10/100Base—T以太網接口及高性能圖形處理。采用X86兼容的64位第六代處理器,最高運行速度可達300MHz,外圍接口豐富,同時配置64MB SRAM和1GB CF卡存儲器,并通過以太網接口進行軟件調試和后期維護。為了實現雙CAN總線通訊接口,選用盛博SEM/CSD一4 CAN通訊模塊,該模塊集成了2路獨立的CAN控制器SJA1000,同時還集成4路RS一422串行接口及可配置的8位并行接口,可以直接驅動外部的數字接口,滿足系統維護和遠程數據采集器工作模式設置的需求,對后續系統升級都留有較大空間。
3.2 遠程數據采集器設計
遠程數據采集器設計為以C805 1 F040 3 為處理器的智能采集通訊節點,C8051F040內部集成了數據采集系統所需要的幾乎所有模擬和數字外設,包括ADC、DAC、電壓比較器、定時器、以及CAN2.0B控制器等,這種高度集成為設計小體積、低功耗、高可靠和高性能的采集系統統提供了方便。系統中遠程數據采集器的硬件結構示意圖見圖2。遠程數據采集器從功能上可分為冗余CAN總線接口、數據采集電路和看門狗超時電路,其中看門狗超時周期為1.6s。為實現冗余CAN總線接口,通過增加一片獨立的CAN控制器SJA1000來實現。
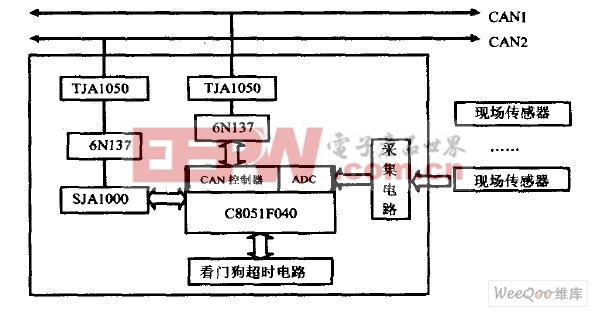
圖2 遠程數據采集器硬件結構示意圖
3.2.1 采集電路設計
采集電路結構如圖3所示,外部模擬信號進入采集器后,先經低通濾波,對各種干擾信號進行一定的抑制后,送入放大器,再進入帶有l2位ADC的C8051F040進行數據采樣和增益轉換。
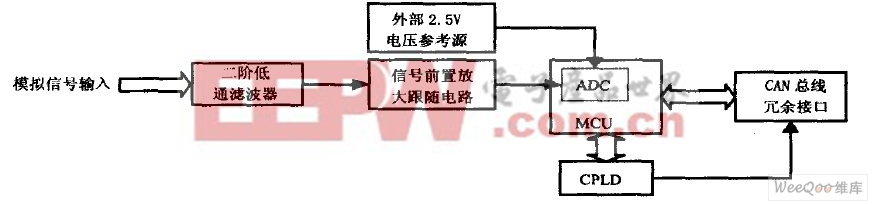
圖3 遠程數據采集器不意圖
在實際的工程應用中,由于被采集信號遠離采集器,以致兩者的地電位存在一定的電勢差,不可避免地存在干擾和傳輸網絡阻抗不對稱引人的誤差。因此。測量電路必須選擇有較高的輸入阻抗和共模抑制比的集成運放,同時可采用差動輸入方式和無限增益電壓負反饋放大。











評論