串行器與攝像芯片應用

標簽:模擬 電子 IT
引言
Maxim串行器可連接并控制攝像頭IC,這類器件包括MAX9257 (帶有半雙工UART/I²C控制通道)、MAX9259和MAX9263 (兩款均帶有全雙工同步控制通道)。MAX9263還支持寬帶數字內容保護(HDCP)。本應用筆記介紹如何將攝像頭的RGB或YUV輸出轉換成標準顯示器接受的RGB數據。
攝像頭輸出數據格式
攝像頭芯片,例如OmniVision® OV10630,可通過串行器連接。OV10630的接口引腳包括:像素時鐘、PCLK、行有效、HREF、幀同步、VSYNC和并行數據位D[9:0]。數據位在時鐘的上升沿保持穩定。
YUV和原始RGB數據格式
CMOS攝像頭傳感器包括數百萬光敏單元,每個單元可響應整個波長的光信號。利用濾光膜使特定傳感器僅響應紅光、綠光或藍光信號。相鄰的光敏單元通常以拜耳結構的濾色規律排列,綠色濾色片的數量是紅色或藍色濾色片數量的兩倍。這種方式用于模擬人眼的感光特性。從左至右、從上至下讀取傳感器單元輸出,原始的RGB數據序列為藍、綠...藍、綠 (首行末尾),綠、紅...綠、紅(第二行末尾),依次類推,如圖1所示。
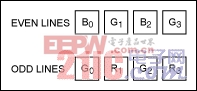
圖1. 原始RGB數據排列
通過相鄰單元內插生成與傳感器單元密度相同的RGB數據。另外,利用相鄰單元的顏色,按照特定的規則可以恢復圖像。構成每個像素RGB數據組的規則之一是:使用同一行的相鄰單元,再加上下一行(或上一行)的綠色相鄰單元。內插后的RGB數據序列為...、紅(i-1)、綠(i-1)、藍(i-1)、紅(i)、綠(i)、藍(i)、紅(i+1)、綠(i+1)、藍(i+1)、...如圖2所示。每個像素需要一組RGB數據,驅動彩色顯示器并保持攝像頭傳感器的最高分辨率。內插RGB數據的亮度分辨率接近于傳感器單元的分辨率,但色度分辨率較差。由于人眼對每個像素的灰度要比對像素的色彩分量更為敏感,所以感覺到的分辨率基本與傳感器單元分辨率相同。

圖2. RGB數據排列
然而,這種RGB數據的內插算法使得數據速率增至三倍。為了降低數據速率,尤其是需要圖像傳輸的場合,可采用YUV彩色空間(將模擬彩色電視信號壓縮到模擬黑白電視的頻帶)。在下式中,亮度以Y表示,藍色和亮度之間的色差以U表示,紅色和亮度之間的色差以V表示,
式中,典型的色彩加權為:WR = 0.299,WB = 0.114,WG = 1 - WR - WB = 0.587,歸一化值為UMAX,VMAX = 0.615。
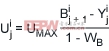
對于采用拜耳濾色鏡的攝像頭傳感器,相鄰像素的U或V數據大致相同,取決于行索引i和像素索引j (如果采用的規則為相鄰顏色)。利用本指南,可根據下式利用RGB數據直接生成YUV數據。![]() 偶數行索引i和偶數像素索引j。
偶數行索引i和偶數像素索引j。
![]() 偶數行索引i和偶數像素索引j。
偶數行索引i和偶數像素索引j。
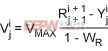
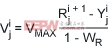
![]() 對于奇數行索引i和偶數像素索引j。
對于奇數行索引i和偶數像素索引j。
![]() 對于奇數行索引i和偶數像素索引j。
對于奇數行索引i和偶數像素索引j。
 偶數行索引i和偶數像素索引j。
偶數行索引i和偶數像素索引j。
 偶數行索引i和偶數像素索引j。
偶數行索引i和偶數像素索引j。
 對于奇數行索引i和偶數像素索引j。
對于奇數行索引i和偶數像素索引j。
 對于奇數行索引i和偶數像素索引j。
對于奇數行索引i和偶數像素索引j。
 偶數行索引i和偶數像素索引j。
偶數行索引i和偶數像素索引j。
 偶數行索引i和偶數像素索引j。
偶數行索引i和偶數像素索引j。
 對于奇數行索引i和偶數像素索引j。
對于奇數行索引i和偶數像素索引j。
 對于奇數行索引i和偶數像素索引j。
對于奇數行索引i和偶數像素索引j。
為了降低數據速率,利用偶數像素索引的U數據和奇數像素索引的V數據,以及偶數和奇數像素索引的Y數據。壓縮后的YUV數據按照圖3所示排列發送,即:Y1、U0和V1為像素1的數據;Y2、U2和V1為像素2的數據等。

圖3. YUV422數據排列
422表示Y:U:V的采樣比,4:x:x標準為早期彩色NTSC標準,按照4:1:1色度再次采樣,所以,圖像的色彩分辨率僅為亮度分辨率的四分之一。目前,只有處理非壓縮信號的高端設備才會采用4:4:4彩色再采樣,亮度和彩色信息的分辨率完全相同。
串行器輸入格式
Maxim串行器的并行接口設計用于24位RGB數據,特別是MAX9259,具有像素時鐘位(PCLK)和29個數據位,用于24位RGB以及行同步、場同步和3個控制位。除并行數據接口外,需要把DRS和BWS引腳設置成高電平或低電平,分別選擇數據速率和總線寬度。
Maxim串行器/解串器
MAX9257和MAX9258串行器/解串器(SerDes)具有18位并行輸入/輸出,適用于YUV數據傳輸;MAX9259/MAX9260芯片組具有28位并行輸入/輸出,適用于RGB數據傳輸;MAX9263/MAX9264 SerDes具有28位并行輸入/輸出,增加了HDCP功能。此外,MAX9265和MAX9268 28位SerDes帶有攝像鏈路,代替并行輸入/輸出接口。所有28位Maxim串行器和解串器具有相同的并/串數據映射,可互換使用。例如,MAX9259串行器可配合MAX9268解串器使用,傳輸RGB數據(借助于FPGA)。數據從CMOS攝像頭通過串行鏈路發送至攝像鏈路接口的顯示器。
串行器映射
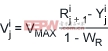
為匹配MAX9268解串器攝像鏈路的輸出接口,并行RGB數據應按照以下信號圖映射。圖4所示為MAX9268并行位與其攝像鏈路輸出之間的映射,圖5所示為相機鏈路的RGB數據映射。表1所示為MAX9259串行器的對應內容映射。
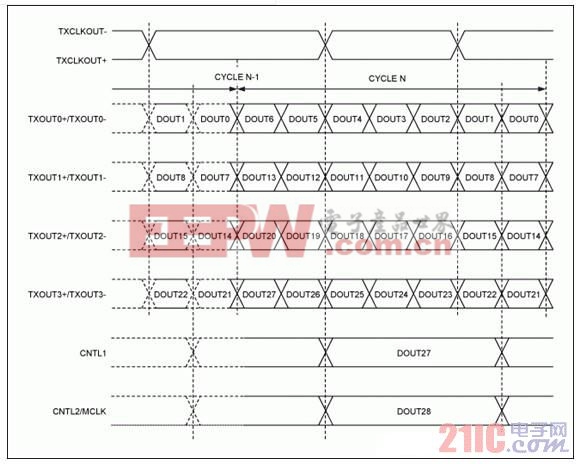
圖4. MAX9268內部并行至輸出映射
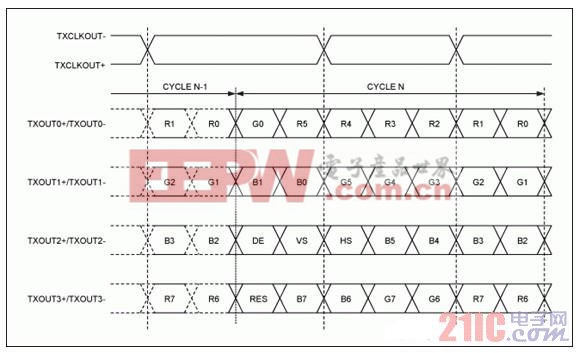
圖5. 攝像鏈路內容映射
表1. MAX9259串行器RGB內容位映射
DIN0DIN1DIN2DIN3DIN4DIN5DIN6DIN7DIN8DIN9
R0R1R2R3R4R5G0G1G2G3
DIN10DIN11DIN12DIN13DIN14DIN15DIN16DIN17DIN18DIN19
G4G5B0B1B2B3B4B5HREFVSYNC
DIN20DIN21DIN22DIN23DIN24DIN25DIN26DIN27DIN28
R6R7G6G7B6B7
色彩轉換:YUV至RGB
FPGA芯片可將壓縮(降低數據速率)后的攝像頭數據YUV轉換成RGB數據,用于MAX9259串行器。采用8位定點運算時,色彩空間轉換的公式如下,式2和式3中,Dn和En的n為偶數。
Cn = Yn - 16
Dn = Dn + 1 = Un - 128
En = En + 1 = Vn + 1 - 128
Rn = clip((298 × Cn + 409 × En + 128) >> 8)
Gn = clip((298 × Cn - 100 × Dn - 208 × En + 128) >> 8)
Bn = clip((298 × Cn × 516 × Dn + 128) >> 8)
式中,>> 8表示“向右移8位”,clip表示“只取最低8位”。
FPGA方案
輸入緩沖
輸入緩沖電路包括計數器、三個寄存器和組合邏輯,將單字節時鐘輸入轉換成三字節時鐘輸出,輸出時鐘速率為輸入的一半。組合邏輯僅用于分別使能Y、U和V字節的對應寄存器。
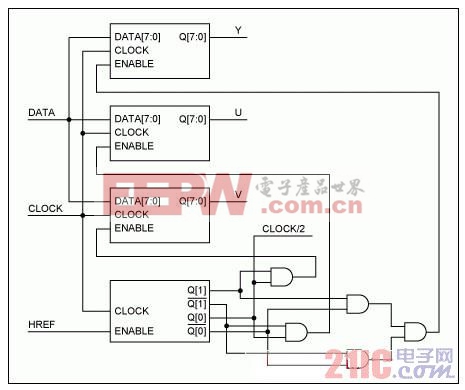
圖6. 輸入緩沖電路
時鐘開關
FPGA輸出像素時鐘速率為攝像頭像素時鐘的一半,用于驅動串行器像素時鐘輸入。但是,攝像頭在初始化之前不會輸出像素時鐘。解決方案是在FPGA內部采用2:1時鐘復用器(mux)和時鐘信號檢測器,mux由時鐘信號檢測器控制。上電時,mux的默認時鐘來自攝像頭的時鐘振蕩器,使SerDes芯片組提供啟動攝像頭的控制通道。時鐘信號檢測器對場同步信號脈沖進行計數,經過幾個場同步脈沖后,mux切換到攝像頭像素時鐘速率的一半。采用高清攝像頭傳感器時,例如OV10630,每個場同步周期包含100k以上的像素時鐘。幾個場同步周期足以使攝像頭的鎖相環(PLL)達到穩定。場同步計數比像素時鐘計數的效率高得多,并可節省FPGA邏輯單元的資源。
中間緩沖
格式轉換表達式中沒有體現硬件電路的延遲。為了從YUV輸入生成RGB數據,需要兩到三次乘法運算和三到四次加法運算。盡管FPGA邏輯電路(門電路) 的延時只有幾個納秒,但載波傳輸、加法器、移位乘法器都會導致不同程度的延時,使整體延時增大。為了使延遲最小化,每個常數乘法器均由兩個移位輸入(代表常數的2個非零最高有效位MSB)的加法器近似。輸入的YUV字節速率大約為100MHz時,延遲會跨越相鄰像素的定時邊界,增大圖像噪聲。在每個乘法器之后通過中間寄存器來消除擴展延時。
以上提及的YUV至RGB彩色轉換已用于Actel® ProASIC3 A3PN125Z FPGA,圖7所示為實現這一FPGA的原理圖。

清晰圖像(PDF, 172kB)清晰圖像(PDF, 180kB)
圖7. YUV至RGB轉換器的FPGA實現
色差儀相關文章:色差儀原理 攝像頭相關文章:攝像頭原理 鎖相環相關文章:鎖相環原理



評論