一種四自由度碼垛機器人機構和運動分析

3 ADAMS運動模擬
ADAMS是對機械系統的運動學與動力學進行仿真計算的經典軟件。為進一步展示碼垛機器人的運動空間形式,本文將solidworks建立的碼垛機器人三維模型導入ADAMS,對機器人進行了運動模擬,其最大運動空間剖面軌跡如圖4所示,該軌跡線反應了一般碼垛機器人的最大運動空間結構。

在完成上述圖4-(b)的模擬中,2軸和3軸Motion驅動角速度如圖5所示:
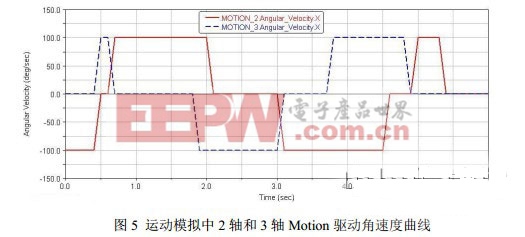
結合圖4和圖5可進一步看出,ER300機器人特定的結構使其在運動過程中,大小臂之間沒有復雜的耦合運動,簡化了機器人運動方式及控制方法。
仿真結果也顯示,在機器人運動過程中,大臂副桿在某些位置承受了較大的拉力。由理論分析可知,當轉矩M不變,大臂副桿的拉力F與其關于3軸的力臂L成反比例函數,從而在某些特定位置,力臂L的較小變化會導致F大幅變化。因此,在機器人設計過程中要充分保證大臂副桿及其組件的強度與剛度,以保證機器人的可靠性和準確性。
4 運動空間數值計算
為準確計算并驗證碼垛機器人的運動可達空間,本文采用了ER300碼垛機器人的基本參數:R=400mm,H=835.5mm,L2=1250mm,L3=1300mm,W=225mm.利用matlab編程計算并繪制了碼垛機器人手腕體D點的理論運動可達空間剖面,如圖6所示:
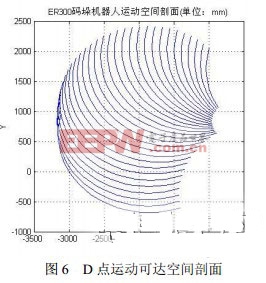
計算結果顯示,當時,機器人末端中心D點達最大工作空間最高點;當時,機器人末端中心D點達最大工作空間最低點;當時,機器人達最大臂展位置,這三點位置決定了碼垛機器人本體分別在垂直和水平方向上的最大碼垛范圍,是衡量碼垛機器人工作性能的重要參數。
再與ADAMS模擬的運動軌跡點坐標計算結果對比,并分別考慮ADAMS模擬的軌跡求解精度誤差和離散計算方法的誤差因素,模擬結果和理論計算結果基本和設計目標一致,均能夠達到最大臂展為3175mm,Y方向搬運高度3104mm的要求。
分別與ABB的IRB660-180、KUKA的KR180-2PA和KAWASAKI的ZD130S工作空間對比,結果顯示在ER300的基本參數下,運動空間與上述同類機器人基本重合,能夠達到市場的一般需求(臂展、碼垛高度等)。
5 結論
本文通過對ER300碼垛機器人機構的分析,展現了一般碼垛機器人的桿件關系、運動形式;說明了該種機構優點的同時,也點出了其在設計過程中需要注意的問題;分別模擬和計算了碼垛機器人的最大運動空間,驗證了機器人的運動形式。



評論