水下航行器模擬平臺智能小車的設計

3 程序軟件設計
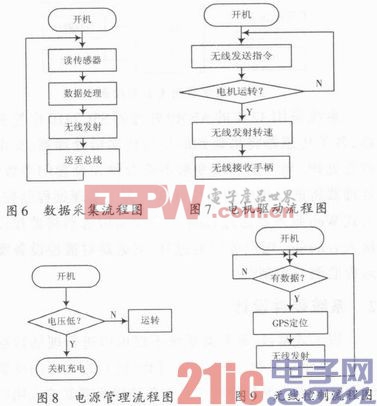
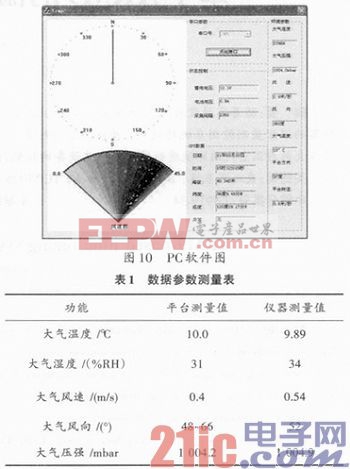
單片機程序包括電源管理、無線控制、數據采集和電機驅動四大功能模塊,PC機軟件包括界面、數據接收與處理、數據存儲和電源狀態四部分,流程圖如圖6~圖9所示,PC軟件如圖10所示。本文引用地址:http://www.104case.com/article/185452.htm
4 系統測試
系統測試在空曠的地方并且人為的設置障礙完成,驗證小車的功能和工作狀態以及各種傳感器的可靠性和精度,用電風扇模擬風,熱風槍模擬氣溫升高,觀察PC界面軟件,測得的數據與相關儀器測得的數據進行比較,結果見表1。
5 結語
本項目準備開發與研制一種陸路智能的運載平臺,用來仿真水下航行器的自身定位與地圖的構建,并且通過一些傳感器將周圍環境的參數通過平臺傳遞給遠程的控制平臺,以便獲取環境的信息。從測試數據中可以看出,智能運載平臺各項功能均能正常工作,基本能夠滿足設計所提出的性能參數要求。

pid控制相關文章:pid控制原理
模擬信號相關文章:什么是模擬信號





評論