基于DSP的三相SPWM變頻電源的設計

PID調節算法
在實際控制中很多不穩定因素易造成增量較大,進而造成輸出波形的不穩定性,因此必須采用增量式PID算法對系統進行優化。PID算法數學表達式為
Upresat(t)= Up(t)+ Ui(t)+ Ud(t)
其中,Up(t)是比例調節部分,Ui(t)是積分調節部分,Ud(t)是微分調節部分。
本文通過對A/D轉換采集來的電壓或電流信號進行處理,并對輸出的SPWM波進行脈沖寬度的調整,使系統輸出的電壓保持穩定。
PID調節算法的部分代碼如下:
float PIDCalc( PID *pp, int NextPoint )
{
int dError,Error;
Error=pp->SetPoint*10-NextPoint; // 偏差
pp->SumError+= Error; // 積分
dError=pp->LastError-pp->PrevError; // 當前微分
pp->PrevError = pp->LastError;
pp->LastError = Error;
return
((pp->Proportion) * Error // 比例項
+ (pp->Integral) * (pp->SumError) // 積分項
+ (pp->Derivative) * dError); // 微分項
}
頻率檢測算法
頻率檢測算法用來檢測系統輸出電壓的頻率。用TMS320F28335片上事件管理器模塊的捕獲單元捕捉被測信號的有效電平跳變沿,并通過內部的計數器記錄一個周波內標頻脈沖個數,最終進行相應的運算后得到被測信號頻率。
實驗結果
測量波形
在完成上述硬件設計的基礎上,本文采用特定的PWM控制策略,使逆變器拖動感應電機運行,并進行了短路、電機堵轉等實驗,證明采用逆變器性能穩定,能可靠地實現過流和短路保護。圖8是電機在空載條件下,用數字示波器記錄的穩態電壓波形。幅度為35V,頻率為60Hz。
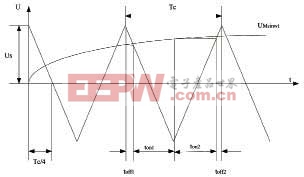
圖7 不規則采樣法生成SPWM波原理圖
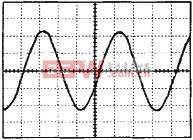
圖8 輸出線電壓波形
測試數據
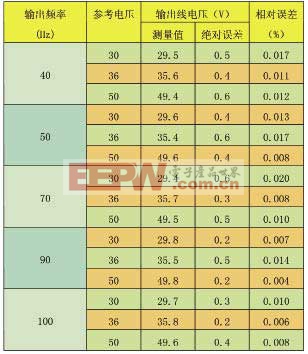
在不同頻率及不同線電壓情況下的測試數據如表1所示。
表1 不同輸出頻率及不同線電壓情況下實驗結果
結果分析
由示波器觀察到的線電壓波形可以看出,波形接近正弦波,基本無失真;由表中數據可以看出,不同頻率下,輸出線電壓最大的絕對誤差只有0.6V,相對誤差為1.7%。
結束語
本文設計的三相正弦波變頻電源,由于采用了不對稱規則采樣算法和PID算法使輸出的線電壓波形基本為正弦波,其絕對誤差小于1.7%;同時具有故障保護功能,可以自動切斷輸入交流電源。因此本系統具有電路簡單、抗干擾性能好、控制效果佳等優點,便于工程應用,具有較大的實際應用價值。











評論