CAN總線在并聯逆變電源中的應用

逆變電源的并聯運行,不僅可實現功率合成,且易于組成積木式、冗余化、智能化的分布式大功率電源網絡系統,是電源技術發展的重要方向。現場總線控制技術可以方便地構建分布式逆變電源局域控制網,使得交流電源系統從傳統的集中式供電向分布式供電乃至智能電源系統供電模式發展,是實現系統智能化控制的有效手段。本文介紹一種基于CAN現場總線的逆變電源的并聯,充分利用TI公司TMS320LF2407A DSP芯片的內部資源,通過內嵌的CAN總線從各并聯模塊獲取并解析現場控制數據,響應現場強實時性操作,實現對模塊工作的調度監控。
2 逆變電源并聯技術
實現逆變電源的并聯運行,其關鍵問題在于各逆變電源要共同分擔負載電流,即要實現逆變電源的均流運行。由于逆變電源模塊并聯運行組成的是交流電源供電系統,各模塊輸出為交流信號,因而,它們之間的并聯要比直流電源的并聯運行復雜得多。逆變電源的并聯需要滿足5項條件[1],即電壓、頻率、波形、相位和相序的相同,只有這樣才能消除環流、均分負載功率,達到最佳的運行狀態,真正實現逆變電源并聯。電源電壓幅值與相位的差異都會引起逆變電源的電流差異,因此,同步運行和電流輸出一致成為實現逆變電源并聯控制要根本解決的問題。本設計采用內嵌在TMS320LF2407A DSP芯片中的CAN總線來實現并聯逆變電源的同步運行和均流。
3 基于DSP的CAN總線設計
基于CAN總線的DSP控制逆變電源并聯控制的硬件設計結構框圖如3-1所示。DSP根據采樣獲得的反饋值與給定值進行比較,控制輸出PWM脈沖,驅動逆變橋功率開關,輸出頻率、幅值、相位可調的正弦電壓。CAN控制器接收來自CAN總線的命令實現對并聯逆變電源模塊的控制。
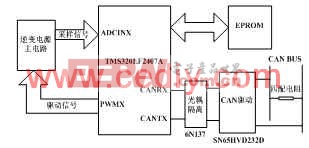
圖3-1 系統硬件結構
3.1 CAN總線硬件設計
DSP芯片TMS320LF2407A中內嵌了一個CAN控制器,CAN總線通訊在本文實現的逆變器并聯的實現中起到重要的作用,它為并聯運行提供了同步信號以及電流給定值的數據傳送。當與CAN總線接口時,必須配上CAN總線接受器[2], DSP芯片TMS320LF2407A采用3.3V電源供電, TI公司專門為3.3 V供電的240x系列DSP設計了3種型號的CAN總線收發器,即SN65HVD230、SN65HVD231和SN65HVD232。它們都是采用3.3 V電源,總線上最多可連120個節點,溫度升高到一定值時,總線自動關閉,節點上電或移去對總線上的其他節點沒有影響,該系列器件支持傳輸速率高達1Mbps。在本系統中就是選用了SN65HVD232作為CAN接受器,它的引腳分布如圖3-2所示。引腳1(D)用于發送數據,引腳4(R)用于接收數據,它們應分別連接到DSP芯片的CANTX/IOP6和CANTX/IOP7。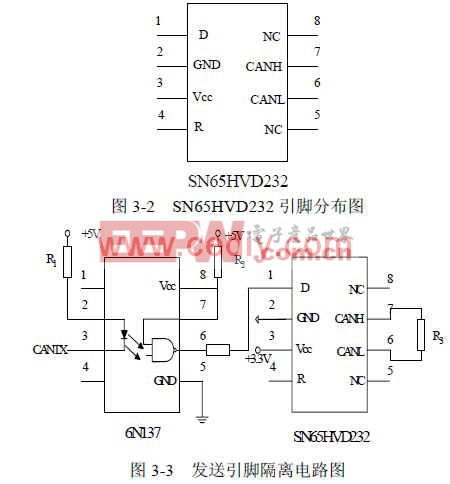
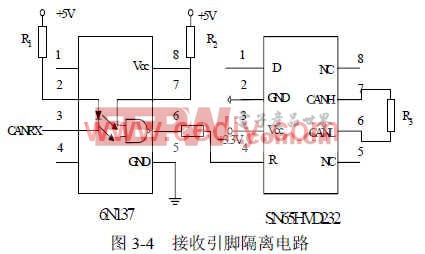
為了進一步提高系統的抗干擾能力,在兩個DSP的CAN通訊之間使用了高速光耦6N137構成隔離電路如圖3-3,3-4所示。采用6N137高速光電耦合器,CAN的網絡速度可以達到和電阻網絡驅動時的速度一樣[3]。數據發送隔離圖中CANTX和數據接收隔離電路中的CANRX均為DSP上的引腳,CANTX為CAN發送數據引腳,CANRX為CAN接受數據引腳,電路中的R1為限流電阻,光耦6N137輸入電流不能小于7.5mA;電阻R2為上拉電阻;電阻R3為CAN總線網絡兩端的匹配電阻,這里選取的是120Ω電阻[4],匹配電阻起著相當重要的作用,忽略掉它們,會使系統數據通信的抗干擾性大大降低甚至無法正常工作。
3.2 CAN總線軟件設計
本設計采用爭主的主從控制策略實現對并聯逆變電源系統的通信。所有從模塊的同步信號、電流瞬時幅值基準取自主模塊。為了適應并聯冗余的要求,避免主模塊故障導致整個系統的工作癱瘓,主模塊是動態確立的。每隔一定的時間,各個模塊都要廣播一個“爭主”請求,如果尚未確立主模塊、或者已經確立的主模塊故障則最先發出“爭主”請求的模塊就可以成為新的主模塊。利用爭主主從控制的原則,在某一主模塊失效的情況下,由其他從模塊競爭成為主模塊,代替原有主模塊的地位,這樣的機制可以保證整個系統不會因為一臺通信主節點的癱瘓造成整個逆變模塊通信系統的癱瘓[5]。











評論