數字電位器MCP41010在止鼾器中的應用

1.1 MCP41010的內部結構
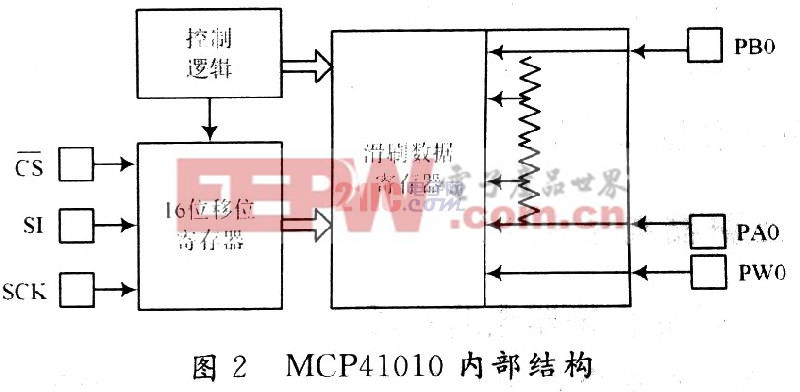
MCP41010的內部結構如圖2所示,從圖2中可以看出,此芯片內含有:SPI總線接口、一個POT(電位器)。POT內有一個8 b滑刷控制數據寄存器。本文引用地址:http://www.104case.com/article/180957.htm
1.2 MCP41010的控制方式
MCP41010具有SPI總線接口,采用簡單的2 B指令結構。它的控制方式非常簡單,可以采用SPI總線通信,也可以采用軟件模擬SPI總線時序。
2 MCP41010的指令格式
MCP41010的指令非常簡單,由兩段組成(如圖3所示),每段均有一個字節:第一段為命令字節,第二段為數據。命令字節中第2,3位和6,7位為無效位,不用對其操作;C1,CO為指令選擇位;P1,PO為電位器選擇位,由于MC2P41010只集成了一個電位器,所以P1,P0必須設為01。在MCP41010中,C1,C0為Ol時為寫數據指令;C1,CO為00或01時為空操作;Cl,CO為10對應關閉模式用于MCP42XXX系列數字電位器。在MCP41010中寫命令字節通常為0xll,數據字段為8 b/s數據,可以置滑動端到256個端點中任何一個,因此精度非常高。
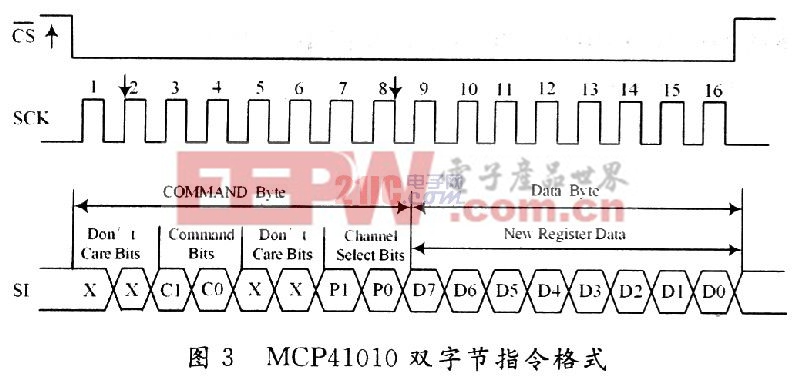
MCP41010的指令序列傳輸示意圖如圖3所示。先寫命令字節再寫數據字節。為數字電位器片選端,只有為低電平時,命令字和數據字才能進入16位移位寄存器。當出現上升沿時,移位寄存器的值進人數據寄存器,從而改變了電位器阻值。SCK為時鐘線,數據在SCK的上升沿進入SI數據線。器件會在上升沿時自動監測低電平時SCK的脈沖數,也就是上升沿的個數,只有時鐘數為16的倍數時,命令才能執行,否則命令失效。一個完整的MCP41010寫時序包括以下幾個部分:
(1)起始位。以為低電平,SCK出現上升沿為起始標志。
(2)傳送MCP41010的命令字段。
(3)傳送8 b的數據字段。
(4)停止位。以SCK為低電平,CS出現上升沿為SPI總線傳輸結束標志。







評論