基于DSP的光伏電池最大功率點(diǎn)跟蹤系統(tǒng)

2 MPPT基本原理
MPPT的實(shí)現(xiàn)實(shí)質(zhì)上是一個(gè)動(dòng)態(tài)自尋優(yōu)過(guò)程,通過(guò)對(duì)陣列當(dāng)前輸出電壓與電流的檢測(cè),得到當(dāng)前陣列輸出功率,再與已被存儲(chǔ)的前一時(shí)刻功率相比較,舍小取大,再檢測(cè),再比較,如此周而復(fù)始。MPPT控制系統(tǒng)的DC-DC變換的主電路采用Boost升壓電路。圖4為Boost變換器的主電路,電路由開(kāi)關(guān)管T、二極管D、電感L、電容C組成。工作的原理為在開(kāi)關(guān)T導(dǎo)通時(shí),二極管D反偏,太陽(yáng)能電池陣列向電感L存儲(chǔ)電能;當(dāng)開(kāi)關(guān)T斷開(kāi)時(shí),二極管導(dǎo)通,由電感L和電池陣列共同向負(fù)載充電,同時(shí)還給電容C充電,電感兩端的電壓與輸入電源的電壓疊加,使輸出端產(chǎn)生高于輸入端的電壓。Boost電路輸入輸出的電壓關(guān)系為: V0=VI/(1-D) (1)
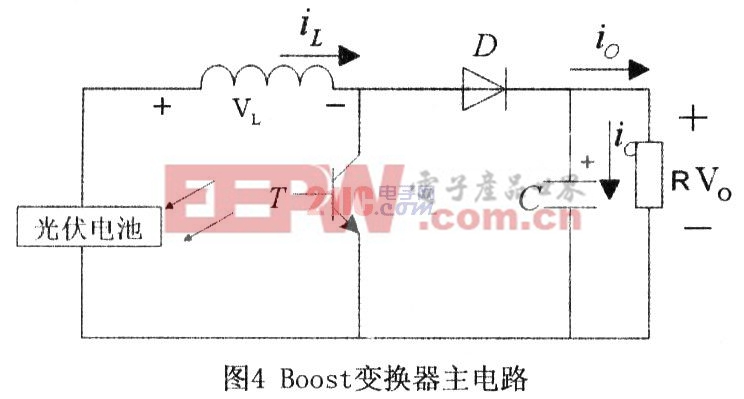
當(dāng)Boost變換器工作在電流連續(xù)條件下時(shí),從式(1)可以得到其變壓比僅與占空比D有關(guān)而與負(fù)載無(wú)關(guān),所以只要有合適的開(kāi)路電壓,通過(guò)改變.Boost變換器的占空比D就能找到與太陽(yáng)能電池最大功率點(diǎn)相對(duì)應(yīng)的VI。
3 MPPT控制的實(shí)現(xiàn)
3.1 控制算法
目前實(shí)現(xiàn)太陽(yáng)能MPPT常用的算法有擾動(dòng)觀察法(PO)和電導(dǎo)增量法(INC)。前者的算法結(jié)構(gòu)簡(jiǎn)單、檢測(cè)參數(shù)少,應(yīng)用較普遍,但在最大功率點(diǎn)附近,其波動(dòng)較大;后者的算法波動(dòng)較小,但較為復(fù)雜,跟蹤過(guò)程需花費(fèi)相當(dāng)長(zhǎng)的時(shí)間去執(zhí)行A/D轉(zhuǎn)換。
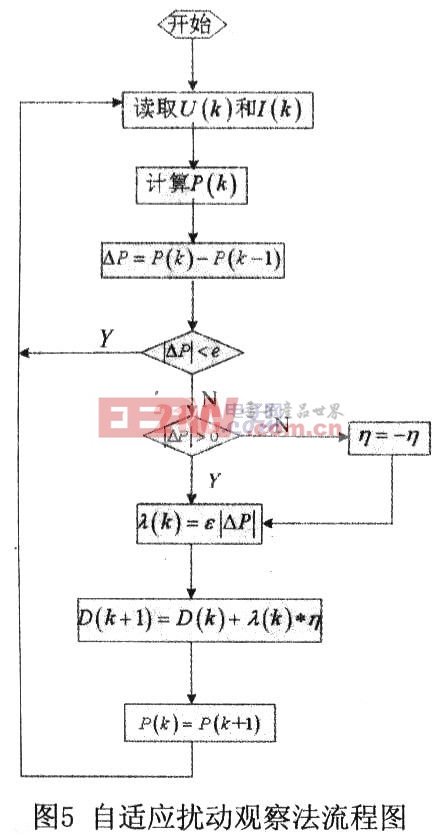
系統(tǒng)采用自適應(yīng)擾動(dòng)觀察法,通過(guò)對(duì)擾動(dòng)觀察法的改進(jìn),引進(jìn)一個(gè)變步長(zhǎng)參數(shù)λ(k)來(lái)解決在最大功率點(diǎn)附近波動(dòng)大的問(wèn)題,其中λ(k)=ε|△P|式中ε是一個(gè)恒定的常數(shù),自適應(yīng)擾動(dòng)觀察法的程序流程圖如圖5所示。圖中e決定了跟蹤精度,λ(k)為占空比步長(zhǎng),決定功率變化的步長(zhǎng),η為擾動(dòng)方向控制系數(shù),取值為1。當(dāng)|△P|e時(shí),認(rèn)為系統(tǒng)已經(jīng)達(dá)到最大功率點(diǎn)附近,λ(k)的值將自動(dòng)調(diào)節(jié)變小來(lái)滿足動(dòng)態(tài)調(diào)節(jié)步長(zhǎng)的要求。
3.2 硬件實(shí)現(xiàn)
控制電路使用TI公司的TMS320F2812 DSP作為主控制芯片,其快速的運(yùn)算能力、豐富的外設(shè)資源能為整個(gè)控制系統(tǒng)提供一個(gè)良好的平臺(tái)。DSP是整個(gè)控制系統(tǒng)的核心,它接受采樣電路送來(lái)的模擬信號(hào),按照控制算法對(duì)采樣信號(hào)進(jìn)行處理,然后產(chǎn)生所需要的PWM波形,經(jīng)驅(qū)動(dòng)放大后控制主電路功率開(kāi)關(guān)管的通斷,從而實(shí)現(xiàn)MPPT。TMS320F2812在時(shí)鐘頻率150MHz下,其時(shí)鐘周期僅為6.67ns,8通道16位PWM脈寬調(diào)制,2×8通道12位A/D轉(zhuǎn)換模塊,一次A/D轉(zhuǎn)換最快轉(zhuǎn)換周期僅為200ns。TMS320F2812 DSP芯片的這些特點(diǎn)能夠滿足MPPT控制精度和速度的要求。
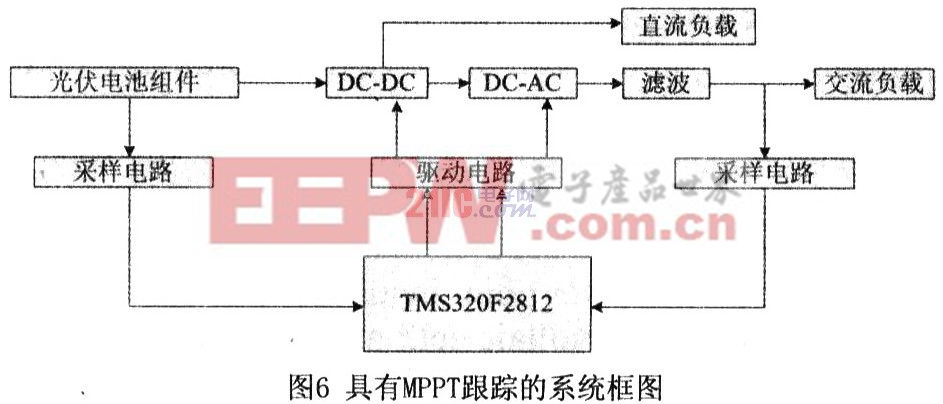
采用其中兩路A/D轉(zhuǎn)換輸入通道作為太陽(yáng)能電池的輸出電流和電壓的采集通道,經(jīng)過(guò)MPPT控制產(chǎn)生驅(qū)動(dòng)PWM波形控制DC-DC開(kāi)關(guān)管的導(dǎo)通時(shí)間,其控制的框圖如圖6所示。









評(píng)論