微機模糊控制在TIG逆變電源中設計

2.1.3 語言變量的隸屬函數
三個語言變量分別對應三個模糊集 、
、 和
和 。鑒于計算上的方便,把、和劃分為7個模糊子集,它們分別是NL、NM、NS、O、PS、PM、PL,每個模糊子
。鑒于計算上的方便,把、和劃分為7個模糊子集,它們分別是NL、NM、NS、O、PS、PM、PL,每個模糊子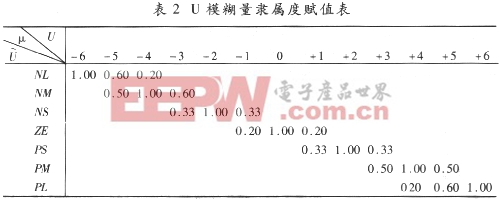
集的論域為[-6,6],語言變量的隸屬函數形狀對控制性能影響不大,故取三角形的分布函數,則E、EC和U從屬于每個模糊子集的隸屬函數如表1和表2所示。
2.2 模糊推理
模糊控制器依據的模糊推理規則是模糊控制器的核心,模糊推理規則主要以人的控制經驗和控制思想為依據,本系統采用的電流推理規則為:當誤差為正大時,選擇控制量以盡快消除誤差為主,而當誤差較小時,以系統穩定為主要出發點,選擇控制量盡量防止超調;
反之亦然,根據這一推理規則,便可獲得相應的控制策略,即對于每一對輸入量和就可得到一個相應的輸出量,見表3。
2.3 模糊判決
從上述模糊推理規則的輸出可以看出,仍是一個模糊量,必須將該模糊量經過模糊判決轉換成相應的精確控制量U。模糊判決的方法有很多,這里采用重心法解模糊量為精確量,其計算公式如下:

應用模糊推理的合成算法可以算出最終的控制作用表,見表4所列,這樣,在模糊控制過程中,由一組實際的輸入量e和ec,經過量化后,便可得出一個控制量,因此本系統根據13個e和13個EC相應得到一個13*13的控制表。
2.4 離線控制表
由于總控制表的計算工作量較大,且計算時間較長,為加快系統的響應速度,先將上述控制表采用離線計算形式,即轉換為表5,八位數字量的最高位設為符號位,把離線表先寫入微機的存儲器中,在實時控制中,只需通過查表的形式,便可獲得實時的控制量。
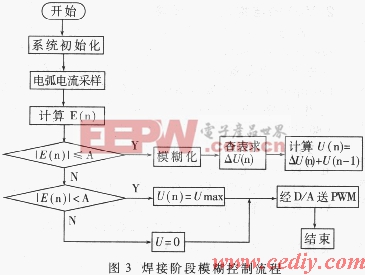
3 系統軟件設計
系統軟件設計可分四個部分:焊前準備,引弧控制、焊接階段控制、收弧控制,焊接階段控制主要是模糊控制,其程序流程見圖3,為了加快控制過程,縮短過渡時間,在程序中分兩個環節進行,當電流偏差大于A門限值時,系統進入加速控制過程,讓信號迅速逼近給定值;當偏差小于等于A門限值時,系統進入模糊控制環節,根據偏差和偏差變化率,量化后查詢模糊離線總控制表,取出控制量的增量,然后進行控制,A的大小由經驗得出。
(1)模糊控制作為一種新型的智能控制法,在焊接電弧電流的控制中能獲得良好的控制效果,具有控制精度高、無超調、動態品質好和魯棒性強的特點。
(2)采用單片機控制系統在滿足電弧電流模糊控制的要求下,具有成本低、控制靈活、可*性高的特點。










評論