GPS接收機(jī)載波跟蹤環(huán)路設(shè)計(jì)

4 載波環(huán)濾波器
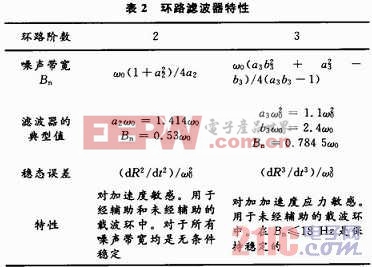
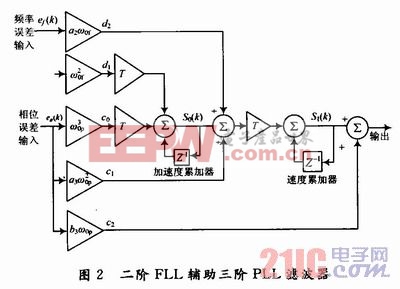
環(huán)路濾波器的作用是降低噪聲,以便對(duì)原始信號(hào)進(jìn)行精確估計(jì),其階數(shù)和帶寬決定了它對(duì)信號(hào)的動(dòng)態(tài)響應(yīng)。為了使接收機(jī)適應(yīng)高動(dòng)態(tài)環(huán)境,本文采用二階FLL輔助三階PLL的環(huán)路濾波器,其原理框圖見(jiàn)圖2。環(huán)路濾波器的特性見(jiàn)表2。
接收機(jī)完成捕獲、碼跟蹤后進(jìn)入載波跟蹤模塊,由于此時(shí)多普勒頻移較大,所以FLL與PLL同時(shí)工作,給環(huán)路濾波器輸入頻差和相差,當(dāng)頻率誤差減小到PLL可以容忍的范圍時(shí),將環(huán)路濾波器的輸入頻差設(shè)為零,即環(huán)路轉(zhuǎn)變?yōu)榧働LL跟蹤模式。
由圖2,環(huán)路濾波器的表達(dá)式為:
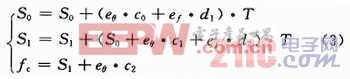
根據(jù)接收機(jī)的使用環(huán)境,確定環(huán)路濾波器的噪聲帶寬Bnf和Bnp,就可以由表2確定濾波器系數(shù)。注意,F(xiàn)LL向?yàn)V波器的系數(shù)插入點(diǎn)與PLL相比要提前一個(gè)積分器,這是因?yàn)镕LL誤差的單位是Hz,而PLL誤差的單位是相位單位。
5 仿真結(jié)果及分析
5.1 FLL鑒別器特性
采用預(yù)檢測(cè)積分時(shí)間T=1 ms,在有數(shù)據(jù)調(diào)制的情況下(±1跳變/ms),輸入頻率誤差范圍為±400 Hz,對(duì)四象限反正切(atan2)和二象限反正切(atan)鑒別器進(jìn)行仿真,結(jié)果見(jiàn)圖3。由圖3可以看出,atan2鑒別算法已不能鑒別出真正的頻率誤差,而atan可以鑒別的范圍達(dá)到±250 Hz。
5.2 PLL鑒別器特性
采用預(yù)檢測(cè)積分時(shí)間T=1 ms,輸入相位誤差范圍為±180°,對(duì)表1的三種相位鑒別器進(jìn)行仿真,結(jié)果見(jiàn)圖4。通過(guò)圖4可看出,只有二象限反正切(atan)鑒別器在±90°的范圍內(nèi)保持線性,且斜率與信號(hào)幅度無(wú)關(guān)。









評(píng)論