用戶電能質量綜合補償器與在線UPS工作原理

2.2 變壓器Tr的變比
變壓器Tr變比k的大小,取決于市電電壓變化的范圍。當用作電能質量綜合補償器時,由于市電電壓的允許變化范圍為±10%,實際有的地方變化范圍可達±20%,所以變比k應取±25%;當用于補償式在線UPS時,當市電停電時電壓的變化為100%,故k值應取1:1,以全電壓對市電電壓進行補償。
3 電流無功補償濾波器
電流無功補償濾波器的原理電路如圖5所示。由于感性負載和非線性負載的作用,使電流含有無功成分并發生畸變,包含無功與畸變的負載電流iaL用傅里葉級數表示時為
iaL=![]()
![]() Ian·sin(nωt+φn)=
Ian·sin(nωt+φn)=![]() Ia1·sin(ωt+φ1)+
Ia1·sin(ωt+φ1)+![]()
![]() Ian·sin(nωt+φn)=
Ian·sin(nωt+φn)=![]() Ia1cosφ1·sinωt+
Ia1cosφ1·sinωt+![]() Ia1sinφ1·cosωt+
Ia1sinφ1·cosωt+![]()
![]() Ian·sin(nωt+φn1)(11)
Ian·sin(nωt+φn1)(11)
此式表明,畸變的電流由三部分組成
i1p=![]() Ia1cosφ1·sinωt=
Ia1cosφ1·sinωt=![]() Iap·sinωt
Iap·sinωt
為基波有功電流;
i1q=![]() Ia1sinφ1·cosωt=
Ia1sinφ1·cosωt=![]() Iaq·cosωt
Iaq·cosωt
為基波無功電流;
ian=![]()
![]() Iansin(nωt+φn)為高次諧波電流。
Iansin(nωt+φn)為高次諧波電流。
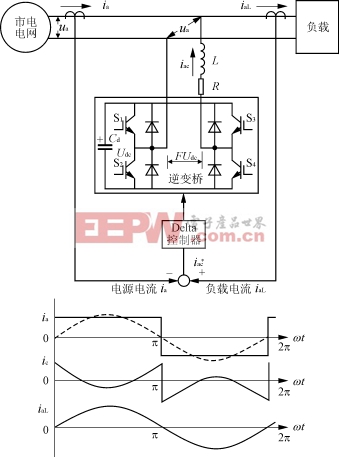
圖5 電流無功補償濾波器
由圖5可知:當完全補償時,負載電流iaL應由市電輸入電流ia和補償電流iac共同供給,即iaL=ia+iac。如果用適當的控制方式,使補償器的輸出電流iac=i1q+ian,則市電只須向負載提供基波有功電流i1p就可以了。這樣就完全實現了補償,市電輸入電流ia與市電電壓ua同相位,輸入功率因數cooφ=1,ia為正弦波電流。如果只需要消除高次諧波電流ian,或只需要補償基波無功電流i1q時,則只須使iac=ian或iac=i1q就可以了。為了能很好地完全補償基波無功電流i1q和高次諧波電流ian,逆變器采用了雙向全橋逆變器,并采用了線性Delta滯環控制方式。
3.1 補償器的數學模型
對有源濾波與無功補償器的要求是具有較強的適應能力和較高的反應速度。圖5所示電路是可以滿足上述要求的。圖中Cd為為儲能電容,R為回路電阻,根據基爾霍夫定律可得
![]() (12)
(12)
式中:ua為市電電壓;
Udc為電容Cd上的電壓;
iac為補償電流;
F為逆變器開關函數。
![]() (13)
(13)
為了使Cd上的電壓Udc恒定,Cd的值應足夠大。由于補償器前面有市電電壓穩壓濾波器,所以ua=Uam·sinωt,將F、ua代入式(12),解出補償電流iac的表示式為
iac=![]() (ωLcosωt-Rsinωt)+
(ωLcosωt-Rsinωt)+![]() (14)
(14)
iac的初始值為
iac(t1)=![]() (ωLcosωt1-Rsinωt1)+
(ωLcosωt1-Rsinωt1)+![]() (15)
(15)
Cd={iac(t1)-〔![]() (ωLcosωt1-Rsinωt1)+
(ωLcosωt1-Rsinωt1)+![]()
![]() 〕}(16)
〕}(16)
將Cd的值代入式(14)得到
iac=![]() 〔(ωLcosωt-Rsinωt)-(ωLcosωt1-Rsinωt1)
〔(ωLcosωt-Rsinωt)-(ωLcosωt1-Rsinωt1)![]() 〕+
〕+
![]() 〔1-
〔1-![]() 〕+iac(t1)
〕+iac(t1)![]() (17)
(17)
由于回路電阻R很小,當令R=0時可得
iac=![]() (cosωt-cosωt1)+
(cosωt-cosωt1)+![]() (t-t1)+iac(t1)(18)
(t-t1)+iac(t1)(18)
式(18)表明,補償電流iac只與電感L有關。
3.2 電感L的值
假定補償對象是整流器,其交流側的電流波形如圖6所示,由此可以得到補償電流參考值![]() 的波形如圖7所示。
的波形如圖7所示。![]() 的變化是不均勻的,求解電感L的值也是很復雜的,為了節省篇幅,L的推導過程省略。從跟蹤角度出發,L值應取得大些。綜合兩者要求,通過推導得到L值計算式為
的變化是不均勻的,求解電感L的值也是很復雜的,為了節省篇幅,L的推導過程省略。從跟蹤角度出發,L值應取得大些。綜合兩者要求,通過推導得到L值計算式為
![]()
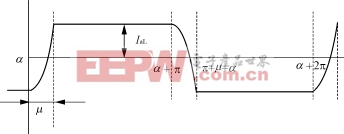
圖6 整流器負載電流
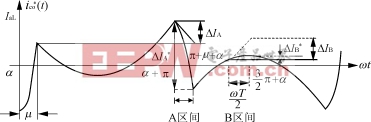
圖7 補償電流參考值
式中:N′為系數,N′=0.3~0.7,參數Uam,Udc,IaL,T(開關周期),α,μ和Iap在額定情況下都是已知的,其含義見圖6。當α=30°,μ=15°,L=3.4mH,fs=5kHz時,仿真結果如圖8所示。此結果表明:市電輸入電流ia由原來的方波,變成了準正弦波。輸入功率因數cosφ=1。

(a) 補償前的電網電流

(b) 補償后的電網電流

(c) 有源濾波器輸出電流
α=30°,μ=15°,L=3.4mH,f=5kHz
圖8仿真波形
3.3 控制方式
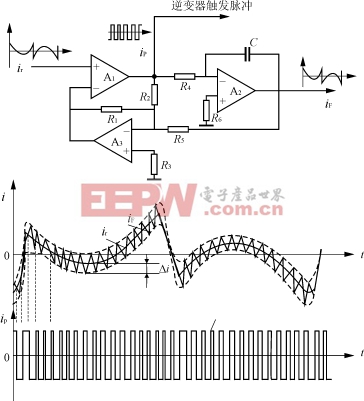
電流無功補償濾波器的控制方式,最好采用線性Delta滯環PWM控制方式,這是由于補償電流參考值![]() 的變化是不均勻的,在換向期間
的變化是不均勻的,在換向期間![]() 變化較大,為了能夠準確跟蹤,采用線性Delta滯環PWM控制,其電路與工作波形如圖9所示。
變化較大,為了能夠準確跟蹤,采用線性Delta滯環PWM控制,其電路與工作波形如圖9所示。
(a) 控制電路
(b) 工作波形
圖9 線性Delta控制電路與工作波形





評論