新型492V/3A充電器的實現

引言
本文引用地址:http://www.104case.com/article/178720.htm 早期的充電器采用單相市電整流,然后BUCK電路降壓輸出的形式,所以在對492V電池組充電時,需要兩個充電器單元串聯工作。這種充電器結構輸入要采用變壓器隔離,所以體積龐大;采用串聯形式故障率高;在實際生產中,組裝也不太方便。在這種情況下,我們設計了本文所提到的新型的充電器。
1 電路原理圖
整個系統由輸入單元、直流變換單元、控制單元和輸出單元組成。輸入單元是三相無零線市電;直流變換單元采用雙管BUCK-BOOST。電路,它可以適應市電304~456V的大范圍變動。控制單元采用電源專用電流型PWM芯片UC3843,它通過檢測輸出的電壓和電流信號來控制開關管的通斷和調整輸出電壓;輸出單元由功率二極管和濾波電容組成。其系統方框簡圖如圖1所示。
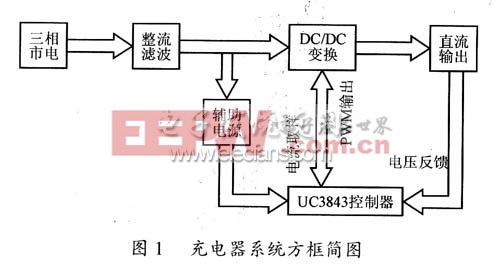
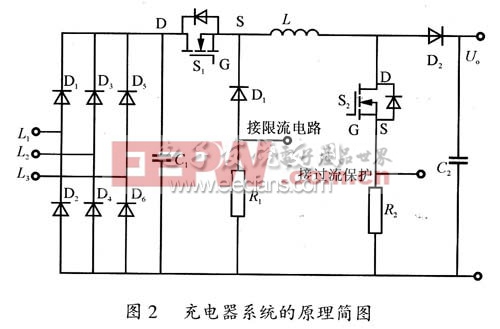
圖2是充電器的主電路原理簡圖。三相市電經不控整流濾波后輸出平穩的直流電,DC/DC變換部分的BUCK-BOOST電路采用的是未簡化的雙管電路,與單管的拓撲結構相比,一是使管子承受的電壓降低一半,二是使短路保護和過流保護的電路設計更加容易。R1和R2為采樣電阻,它們可以根據電感上的峰值電流來選定,保證其上的電壓低于1V。S1和S2選擇800V/27A的MOS場效應管,D1和D2選擇1200V/15A的軟恢復功率整流二極管。電感L根據系統的輸出功率來定。
1.1 驅動電路
UC3843是高性能固定頻率電流模式控制器,腳1是輸出補償端,當其電壓低于1V時,UC3843的腳6關閉輸出,電路設計時,利用它實現輸入過欠壓、輸出過欠壓、缺相和限流保護等功能,各種保護通過“與”的形式接至腳1。腳3是電流采樣端,當其電壓高于1V時,控制器的腳6也鎖閉輸出,利用它實現過流保護功能。腳4是定時元件輸入端,由它來產生UC3843工作時的振蕩頻率。在設計電路時,由于整個系統工作在較高功率和頻率下,MOS管在關斷時控制器腳6被外部器件拉得低于地電位產生尖峰噪聲,它干擾內部振蕩器的正常工作,造成電路工作不穩定,所以腳4改用外部振蕩電路。選用555時基電路產生。
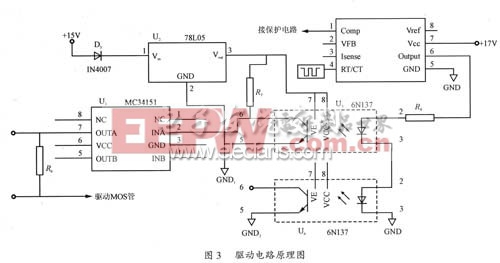
一個頻率為40kHz,占空比為80%的振蕩波,直接連到腳4作為UC3843的外部同步時鐘輸人。功率電路上的兩個MOS場效應管,S1為浮地驅動,而S2為共地驅動,腳6輸出PWM驅動信號。圖3是驅動電路原理圖,為求簡化,圖3中只畫出了一路驅動。腳6輸出的驅動信號經光藕隔離后,再運用集成電路芯片MC34151對信號放大。驅動電阻的大小選擇非常關鍵,太小會使驅動波形上升沿過陡,開通過程過快,容易產生振蕩使電路不穩;電阻太大會減慢開通過程,很容易使MOS管經過放大狀態后再進入飽和狀態,增加了管子的開關損耗,這也是我們所不希望的,所以折中考慮,取驅動電阻的大小為15Ω。圖3中與驅動電阻并聯的二極管是MOS管關斷時放電通道,加快關斷過程。
1.2 限流電路
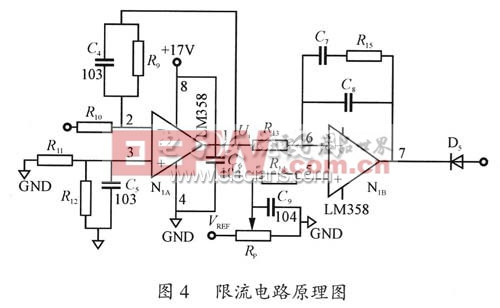
充電器對鉛酸蓄電池組充電時,起初電池電壓較低,如果不采取任何措施,充電電流很大,這對電池極為不利,影響電池的使用壽命,所以必須加限流保護電路。圖4為限流保護電路的原理圖。它有兩部分組成:取樣電路和PI調節電路。從電阻R1(見圖2)取樣回來的電流電壓值經放大處理后,與閾值電壓作比較。閾值電壓由圖4中VREF經電位器調節獲得,不同的閾值電壓對應不同的限流保護值。本設計取3A作為限流保護值,當充電電流大于小于3A時,比較器輸出高電平信號,此時二極管不通;當充電電流大于3A時,比較器反轉,輸出的低電平信號通過二極管拉低UC3843的腳1電位,從而實現了限流功能,此時充電器對外表現為恒流特性。
1.3 均流電路
充電器并聯運行時,必須有均流措施,保證負載電流平均分配,增強系統的運行可靠性。均流措施很多,有外特性下垂法、主從電源設置法、外部電路控制法、平均電流法、最大電流法等。圖5為本設計所采用的平均電流法電路原理圖,其基本原理是充電器系統各單元的電流值通過均流電阻送到均流母線上求平均值,然后各單元電流值與之比較,形成偏差信號去控制UC3843的腳2。在圖5中R18=R21=Ra,R19=R20=Rb,運放腳7的輸出為

式中:Uav為母線平均電壓;Ui為一個單元的電流所對應的電壓值(見圖4)。
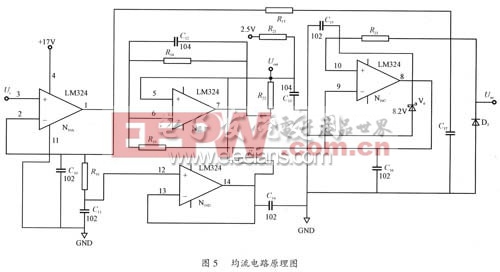
2.5V為基準電壓,它保證充電器模塊有個靜態輸出, 為誤差調節電壓,它保證充電器系統在均流時的動態輸出。它是通過誤差信號調整輸出電壓的方法來調整輸出電流,當某單元Ui小于Uav時,誤差調節電壓為負,Uout2.5V,控制器輸出PWM的占空比增大使單元輸出電流增大;反之,控制器輸出占空比減小,輸出電流減小。
為誤差調節電壓,它保證充電器系統在均流時的動態輸出。它是通過誤差信號調整輸出電壓的方法來調整輸出電流,當某單元Ui小于Uav時,誤差調節電壓為負,Uout2.5V,控制器輸出PWM的占空比增大使單元輸出電流增大;反之,控制器輸出占空比減小,輸出電流減小。







評論