基于LF2407A的并聯逆變電源設計

3.2 CAN總線軟件設計
本設計采用爭主的主從控制策略實現對并聯逆變電源系統的通信。所有從模塊的同步信號、電流瞬時幅值基準取自主模塊。為了適應并聯冗余的要求,避免主模塊故障導致整個系統的工作癱瘓,主模塊是動態確立的。每隔一定的時間,各個模塊都要廣播一個“爭主”請求,如果尚未確立主模塊、或者已經確立的主模塊故障則最先發出“爭主”請求的模塊就可以成為新的主模塊。利用爭主主從控制的原則,在某一主模塊失效的情況下,由其他從模塊競爭成為主模塊,代替原有主模塊的地位,這樣的機制可以保證整個系統不會因為一臺通信主節點的癱瘓造成整個逆變模塊通信系統的癱瘓[5]。
對TMS320LF2407A的CAN控制器的編程主要是利用幾個郵箱進行數據的接收和發送,配置有6個郵箱,2個接收(0,1號),2個發送(4,5號),2個可配置(2,3號);每個郵箱數據長度為8B。設置郵箱3為發送非廣播郵箱,郵箱2為接收非廣播信息郵箱,郵箱4為發送廣播的郵箱,郵箱0為接收廣播的郵箱。整個通信系統主要分為一個主節點和多個子節點,其中郵箱4,在一定的時間定期以廣播的形式向總線發送爭主請求,以探測主節點是否工作正常。郵箱0的功能就是接收并區分這兩種信息,并判斷自身的地位,決定是否利用郵箱4發送反對爭主請求。郵箱2的主要功能是接收主節點的控制信息,并且通知郵箱3發送響應的響應信息。在圖3-5中給出了關于信息發送流程的描述。
4 實驗
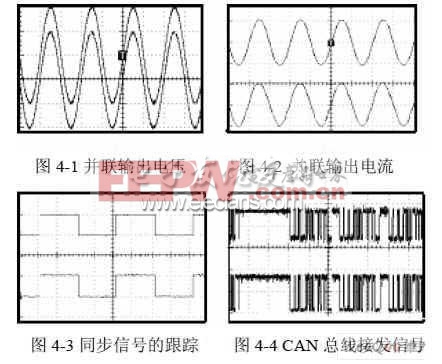
根據本文提出的CAN現場總線的逆變電源并聯的控制方案,在兩臺逆變電源上進行了并聯實驗。圖4-1為兩臺并聯逆變電源輸出電壓,電壓幅值100V/格,圖4-2為兩臺并聯逆變電源輸出電流,電流幅值10A/格,表明均流效果很好。圖4-3為從模塊跟蹤主模塊的同步信號,圖4-4顯示的是主模塊CAN總線發送的信號與從模塊的CAN總線接收的信號,信號在傳送過程中沒有丟失,一致性非常好,達到了預期的效果。
5 結束語
本文的設計利用了LF2407A自身內嵌CAN總線控制技術方便地構建了分布式逆變電源局域控制網,不僅使逆變電源并聯方法簡便,同時為各模塊提供了穩定可靠的數據通信,支持逆變電源的熱插拔性,系統具有結構簡潔、擴容方便、可靠性高的優點。










評論