三級無刷交流發(fā)電機(jī)調(diào)壓系統(tǒng)的建模及其仿真分析

一、引言
本文引用地址:http://www.104case.com/article/177221.htm三級式無刷交流同步發(fā)電機(jī)由副勵(lì)磁機(jī)、勵(lì)磁機(jī)和主發(fā)電機(jī)組成。主發(fā)電機(jī)為旋轉(zhuǎn)磁極式同步發(fā)電機(jī);交流勵(lì)磁機(jī)是旋轉(zhuǎn)電樞式同步發(fā)電機(jī);副勵(lì)磁機(jī)為旋轉(zhuǎn)磁極式的永磁同步發(fā)電機(jī)。交流勵(lì)磁機(jī)轉(zhuǎn)子上裝有整流器(旋轉(zhuǎn)整流器),發(fā)電機(jī)運(yùn)轉(zhuǎn)時(shí),勵(lì)磁機(jī)電樞產(chǎn)生的交流電經(jīng)旋轉(zhuǎn)整流器直接整流給主發(fā)電機(jī)勵(lì)磁繞組供電;而副勵(lì)磁機(jī)專門為調(diào)壓器和控制保護(hù)電路供電。這種發(fā)電機(jī)避免了電刷滑環(huán),具有可靠性高,無需經(jīng)常維護(hù)等優(yōu)點(diǎn)。無刷交流發(fā)電機(jī)電壓調(diào)節(jié)器通過控制勵(lì)磁機(jī)的勵(lì)磁電流間接的調(diào)節(jié)主發(fā)電機(jī)的勵(lì)磁電流,達(dá)到調(diào)節(jié)輸出電壓的目的[1,2]。其原理如圖1所示。
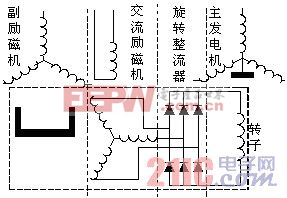
圖1 三級無刷交流同步發(fā)電機(jī)結(jié)構(gòu)原理圖
研究交流發(fā)電機(jī)調(diào)壓系統(tǒng)的穩(wěn)定性就是利用自動(dòng)控制理論分析系統(tǒng)受到干擾后的動(dòng)態(tài)品質(zhì)和穩(wěn)定性,以及構(gòu)成系統(tǒng)環(huán)節(jié)及其參數(shù)對系統(tǒng)性能、品質(zhì)的影響程度,從而能指導(dǎo)系統(tǒng)的設(shè)計(jì)和改進(jìn)。本文基于物理建模的方法建立了發(fā)電機(jī)調(diào)壓系統(tǒng)的數(shù)學(xué)模型,然后分別利用頻域法和時(shí)域法分析了系統(tǒng)的動(dòng)態(tài)品質(zhì)及其穩(wěn)定性。
二、發(fā)電機(jī)調(diào)壓系統(tǒng)的建模
調(diào)壓器的基本組成如圖2所示,有檢測、比較、放大、與執(zhí)行(操縱、控制)四個(gè)環(huán)節(jié)
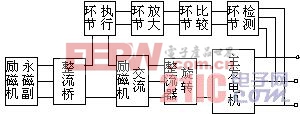
圖2 三級無刷交流發(fā)電機(jī)調(diào)壓系統(tǒng)原理框圖
1、三級發(fā)電機(jī)建模
對于恒速恒頻電源系統(tǒng),在忽略發(fā)電機(jī)阻尼繞組作用以及電樞繞組變壓器電勢情況下,電磁式同步發(fā)電機(jī)可以等效成一階慣性環(huán)節(jié)[1-3],即同步發(fā)電機(jī)的線性化傳遞函數(shù)可以寫成
(1)
其中k為發(fā)電機(jī)的電壓增益,r為發(fā)電機(jī)時(shí)間常數(shù),與負(fù)載大小有關(guān):
在三級發(fā)電機(jī)系統(tǒng)中,永磁副勵(lì)磁機(jī)可看成一放大的比例環(huán)節(jié)
(3)
在某確定負(fù)載下,橋式整流的換相重疊角r為一固定值,因而整流橋亦為一比例環(huán)節(jié)
(4)
因此,三級無刷交流發(fā)電機(jī)的線性化傳遞函數(shù)為
(5)
2、調(diào)壓器建模[3]
檢比模塊
根據(jù)文獻(xiàn)[3],平均電壓檢測的檢比回路可以等效為一階慣性環(huán)節(jié)
(6)
調(diào)制模塊
調(diào)制模塊的比較器輸出基本上沒有延時(shí),其線性化傳遞函數(shù)為:
(7)
為鋸齒波(三角波)幅值
根據(jù)三級發(fā)電機(jī)調(diào)壓系統(tǒng)的結(jié)構(gòu)原理,建立了平均電壓檢測的Matlab仿真模型,如圖3所示。
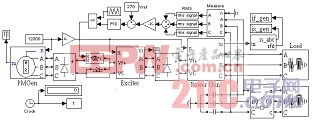
圖3 三級發(fā)電機(jī)調(diào)壓系統(tǒng)仿真模型
在利用軟件對調(diào)壓進(jìn)行器建模時(shí),檢比模塊可以等效為一比例環(huán)節(jié),硬件概念上可認(rèn)為是減小濾波電容沖放電時(shí)間常數(shù),加快系統(tǒng)響應(yīng)時(shí)間。調(diào)制模塊由三角波與放大補(bǔ)償輸出信號(hào)交割,輸出PWM信號(hào)。這些措施體現(xiàn)了軟硬件的結(jié)合的一致性,認(rèn)為是可行的。
3、系統(tǒng)特性分析
某無校正環(huán)節(jié)的發(fā)電機(jī)調(diào)壓系統(tǒng)在滿載情況下開環(huán)傳遞函數(shù)為
(8)
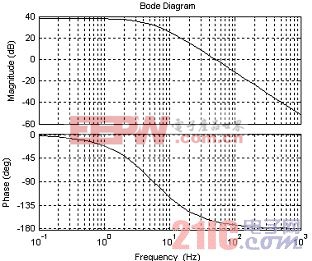
圖4 無校正環(huán)節(jié)的發(fā)電機(jī)調(diào)壓系統(tǒng)幅相特性
從圖4的系統(tǒng)開環(huán)幅頻特性曲線可以看出:不加任何校正環(huán)節(jié)的發(fā)電機(jī)調(diào)壓系統(tǒng),滿載情況下系統(tǒng)穩(wěn)定相角裕度小,低頻增益低。為使系統(tǒng)有更高的低頻開環(huán)增益和更大的相角裕度,可在系統(tǒng)中增設(shè)串聯(lián)校正環(huán)節(jié)來改善系統(tǒng)的性能[4]。傳統(tǒng)的PID串聯(lián)校正可以滿足系統(tǒng)性能的要求,但是該系統(tǒng)的高頻衰減特性差,容易受到高頻信號(hào)的干擾,在擾動(dòng)突變時(shí)就顯示出微分的缺陷。在PID算法中加入一個(gè)低通濾波器
,可改善系統(tǒng)的性能[5]。具有改進(jìn)PID校正環(huán)節(jié)的傳遞函數(shù)為:
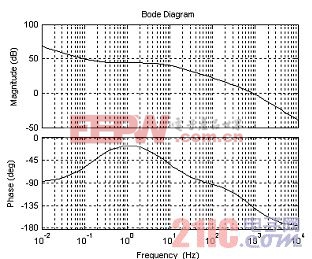
圖5 有改進(jìn)PID校正環(huán)節(jié)的發(fā)電機(jī)調(diào)壓系統(tǒng)幅相特性
從圖5的開環(huán)系統(tǒng)幅頻特性曲線可以看出,帶低通濾波器的PID串聯(lián)校正環(huán)節(jié)的發(fā)電機(jī)調(diào)壓系統(tǒng),有更大的相角裕度和更高的低頻開環(huán)增益,同時(shí)提高了系統(tǒng)的截止頻率,加快了系統(tǒng)的動(dòng)態(tài)響應(yīng)速度。
三、數(shù)字時(shí)域仿真分析
發(fā)電機(jī)調(diào)壓系統(tǒng)的時(shí)域仿真模型如圖3所示,仿真條件:轉(zhuǎn)速12000rpm,主發(fā)電機(jī):額定功率
,頻率
,勵(lì)磁繞組時(shí)間常數(shù)
;勵(lì)磁機(jī):額定功率
,頻率
,勵(lì)磁繞組時(shí)間常數(shù):
;負(fù)載:20%額定載突加到200%額定載,再突減到20%額定載。采用上述帶低通濾波器的PID串聯(lián)校正環(huán)節(jié)。從圖6所示的主發(fā)電機(jī)輸出可以看出,此發(fā)電機(jī)調(diào)壓系統(tǒng)具有良好的動(dòng)態(tài)性能和穩(wěn)態(tài)精度,勵(lì)磁電流脈動(dòng)小,輸出電壓平穩(wěn)無脈動(dòng)。在負(fù)載突變的情況下,主發(fā)電機(jī)輸出電壓在30ms內(nèi)回復(fù)正常值,符合規(guī)范要求。
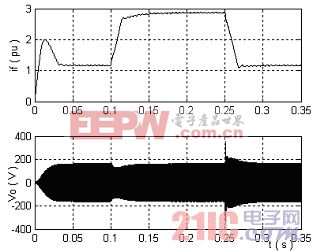
圖6系統(tǒng)主發(fā)電機(jī)勵(lì)磁電流和輸出電壓波形
四、結(jié)論
通過分析三級發(fā)電機(jī)調(diào)壓系統(tǒng)的幅頻特性,采取一種帶有低通濾波器的PID控制策略,從而增大了系統(tǒng)的開環(huán)增益和相角裕度,提高了系統(tǒng)的截止頻率,加快系統(tǒng)的響應(yīng)速度。
參考文獻(xiàn)
[1] 嚴(yán)仰光. 航空航天器供電系統(tǒng). 航空工業(yè)出版社. 1995年8月
[2] 蔣志揚(yáng),李頌倫. 飛機(jī)供電系統(tǒng).國防工業(yè)出版社. 1990年4月
[3] 謝少軍. 飛機(jī)交直交變速恒頻電源系統(tǒng)的數(shù)字仿真. 南京航空航天大學(xué)博士研究生學(xué)位論文. 1995年10月
[4] 胡壽松. 自動(dòng)控制原理.科學(xué)出版社2001年2月
[5] 劉金錕. 先進(jìn)PID控制Matlab仿真. 電子工業(yè)出版社. 2004年9月

低通濾波器相關(guān)文章:低通濾波器原理
調(diào)壓器相關(guān)文章:調(diào)壓器原理 汽車防盜機(jī)相關(guān)文章:汽車防盜機(jī)原理



評論