新型半主動激光制導實物仿真系統設計與實現

摘要:設計并實現了一種激光半主動制導實物仿真系統,系統主要包括光電探測、信號處理和伺服部分。介紹了系統的工作原理以及主要電路的設計。該系統體積小,操作方便,控制靈活等優點。實際應用結果表明,該仿真系統對模擬激光目標的跟蹤穩定,具有良好的實時性和較強的實用性。
關鍵詞:激光制導;半實物仿真;峰值保持;電路
隨著以計算機為代表的信息化技術的飛速發展,半實物仿真技術在國內外的航空航天、通信等眾多軍用和民用領域都發揮著重要作用,具有費用低,開發周期短等特點。激光半主動制導半實物仿真系統在激光制導武器的研究、試驗、作戰仿真和教學訓練中有重要作用。為測試激光制導干擾設備對激光制導的干擾效果,開發研制了該系統。
1 系統組成及工作原理
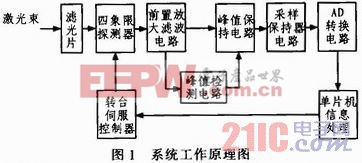
該仿真系統主要由光學系統、光電探測器、信號處理電路和伺服系統組成。系統的工作原理是這樣的:用NdYAG模擬激光源發射經過編碼的激光束,經過濾光片照射到四象限光電探測器,光電探測器將接收到的激光光信號轉變為電信號輸出給后續處理電路。光電探測器輸出的電信號進過自適應前置放大濾波電路、峰值保持電路和AD轉換電路,進入微處理器,通過光斑檢測四元定位算法,解算出目標光斑偏離中心的偏差即偏離目標光源中心點的脫靶量,根據脫靶量形成對伺服系統的控制指令,二維轉臺伺服控制系統根據控制指令調整導引頭的姿態,穩定跟蹤模擬目標光源,原理流程框圖如圖1所示。
系統光電探測器組件采用中國電子工業集團公司第四十四所生產的GD4311Y四象限光電探測器。它具有可控增益、響應速度快、盲區小、噪聲低;均勻性、對稱性好等特點,在激光定位、激光制導等方面應用廣泛。它的光敏尺寸為φ8 mm,響應波長范圍為850~1 064 nm。為了增強探測效果,濾除背景和噪聲的干擾,在探測器前加裝了濾光片,對進入到探測器的激光進行了過濾。二維轉臺伺服系統為雙自由度高精度數字云臺PTO1502,前后俯仰72°,水平旋轉-157°~157°,RS485通信接口,24 V/3 A直流供電,70多條默認缺省指令集,指令響應時間12ms。
2 硬件電路設計
2.1 前置放大電路
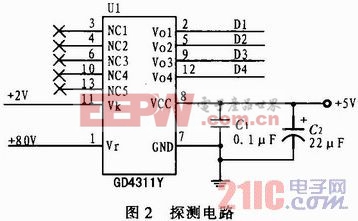
GD4311Y四象限探測器電路如圖2所示,其中U1為GD43311Y探測器,D1、D2、D3、D4為四象限電流信號輸出,+80 V的作用是給探測器提供的典型偏置電壓,+2 V的作用是給探測器提供增益控制電壓,+5 V的作用是給探測器提供的正電源,為了保證電源穩定,在正電源與地之間必須接入100 pF的電容。






評論