一種基于滑模控制的新型Boost正弦波逆變器

1 引言
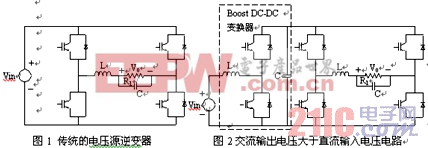
本文引用地址:http://www.104case.com/article/176513.htm逆變器是將直流變成交流的靜止變流裝置,我們把傳統的電壓源逆變器(VSI)稱為Buck逆變器,是指瞬時平均輸出電壓低于直流輸入電壓,電路如圖1所示。它已廣泛應用到交流電動機驅動和不間斷電源(UPS)系統中。因此,當需要輸出電壓高于輸入電壓時,必須在直流電源和逆變器之間加一個DC-DC變換器。如圖2所示,涉及到功率和電壓等級問題,這將導致逆變器體積增大、重量增加、價格升高和效率降低。
本文討論一種新的電壓源逆變器,稱為Boost逆變器,它由兩組對稱boost電路組成,將產生一個比直流輸入電壓高的交流輸出電壓,并采用滑模控制策略,利用它對系統參變量的擾動和負載的變化都具有不敏感性,使系統具有良好的動態和穩態響應,從而獲得平滑的正弦波輸出電壓。
2 新型逆變器的工作原理
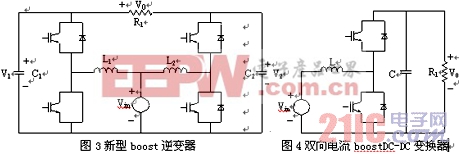
本文討論的正弦波逆變器基本電路如圖3所示,它是由兩個boost DC-DC變換器組成,通過滑模控制,使每個DC-DC變換器各產生一個有相同直流偏置的單極性正弦波輸出電壓,而且兩個輸出電壓在相位上相差180°。由于負載跨接在兩個DC-DC變換器之間,所以,每個逆變器流過雙向電流,對于其中一個DC-DC變換器,如圖4所示。
根據參考文獻[1]對boost電路的分析,用平均值的概念,我們可得到連續導通模式下的電壓關系式
(1)
這里D是占空比。
由于兩個DC-DC變換器相差180°,則可得到另一個DC-DC變換器輸出電壓的關系式:
根據式⑷可獲得如圖5關系特性曲線圖,從圖中可見D=0.5時,輸出電壓特性為零,如果占空比圍繞這個點變化,在輸出端可獲得正弦波電壓。
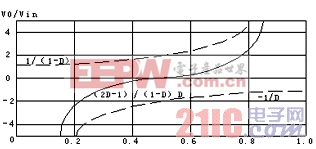
圖5 boost逆變器輸出特性
滑模變結構控制理論產生于五十年代,歷經四十余年已發展成為一種完備的自動控制系統設計方法。它實質上是一種高頻開關控制的狀態反饋系統,由于滑模控制方案具有穩定性好、魯棒性強和良好的動態性能以及控制容易實現等優點。滑模控制就是利用高速切換的開關控制,把受控非線性系統的狀態軌跡引向一預先指定的狀態平均空間平面(滑模面)上,隨后系統的狀態軌跡就限定在這個平面上,因此,一個滑模控制系統的設計為兩個方面:首先是尋求滑模面函數,使控制系統在滑模面上的運動漸趨穩定且品質良好;其次是設計變結構控制,使系統可由相空間的任一點于有限時間內到達滑模面,從而在滑模面上形成滑模控制區。
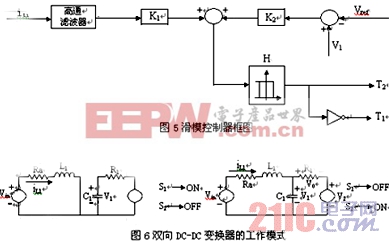
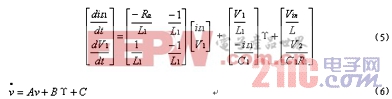
由于本逆變器由兩組對稱boost DC-DC電路組成,并具有獨立性。下面僅對一個雙向DC-DC變換器(圖4所示)的控制進行分析,控制框圖如圖5所示。工作過程如圖6所示,當開關S1閉合時S2打開,iL1線性增加,二極管處于反向偏置,電容C1通過負載放電,V1電壓降低;當S1打開時S2閉合,iL1流過電容C1和輸出端,iL1減少而電容C1充電。
由變量iL1和V1表示的等效狀態空間模型電路如下:
式中Υ開關狀態, 狀態變量誤差。定義Υ為

(7)
為獲得較好的輸出電壓瞬態響應,以狀態變量偏差(根據參考變量的差定義)的線性組合來表示狀態空間的滑動平面方程由(5)式給出
S(iL1,V1)=k1ε1+k2ε2=0 (8)
這里系數k1和k2是增益,ε1是輸出電壓偏差,ε2是輸出電流偏差,可表示為式(6)、式(7):
ε1=i1-iLref (9)
ε2=V1-Vref (10)
S(iL1,V1)=k1(i1-iLref)+k2(V1-Vref) (11)
信號S(x)通過一個滯環比較器產生開關管的控制信號,通過閉環控制,使得變量S(x)根據變結構理論,變換器方程可改寫為:
式中x為狀態變量誤差,
把(13)代入(11)中,可得如下等式:








評論