基于臺達AFE2000的四象限變頻控制

1 前言
本文引用地址:http://www.104case.com/article/176302.htm自上世紀80年代末,變頻調速技術登上工業傳動的歷史舞臺以來,變頻調速技術就以其調速范圍寬、調速精度高、工作效率高、控制靈活和使用方便等優點,成為最具影響力的工業自動化調速技術。基于該技術發展的變頻器一直延續著采用無控或半控器件來進行電網側的整流,這種模式導致了變頻器只能工作在電動狀態,無法實現真正的制動,因此這類變頻器被稱為兩象限變頻器。兩象限變頻器的弱點在于無法實現制動回饋,導致電能的浪費;此外功率因數較低,DCBUS上的電流無法形成真正的正弦,間接地造成了電能不必要的浪費。
兩象限變頻器最大的問題就是整流側的器件無法實現全控,導致無法進行能量回饋操作。因此,高頻PWM整流技術孕育而生了。高頻PWM整流技術分為直接電流控制PWM整流和間接電流控制PWM整流兩種方式,間接PWM整流是依據PWM整流器的穩態電壓平衡關系得到的控制方式,具有良好的靜態特性,控制簡單方便,但是同時由于沒有檢測輸入交流電流,造成動態響應慢、穩態性差。因此,在實際的設計中往往在間接電流PWM整流的基礎上增加電壓外環,組成雙閉環結構,保證動態響應。
2 三相PWM整流器工作原理
2.1 主回路工作模式
三相電壓型PWM整流器主回路如圖1所示。
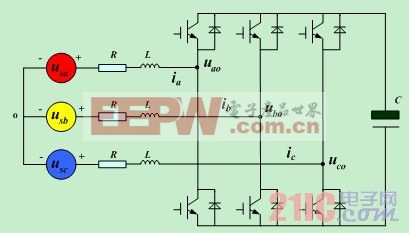
圖1 三相電壓型PWM整流器主回路
當整流器進入穩定工作狀態,輸出直流電壓恒定,整流橋的三相橋臂按正弦的脈寬調制規律驅動。當PWM整流器處于整流狀態時,三相交流電源將會通過IGBT或二極管向DC端進行整流。當PWM整流器處于逆變狀態,即需要進行能量回饋的時候,DC端電流將會通過IGBT或整流器向電網回饋。
為了討論三相PWM整流器的整流與逆變過程,采用圖2所示的空間電壓矢量來描述三相橋臂的開關狀態。

圖2 空間電壓矢量
圖2表明,當電網電壓信號經過一個周期后,空間電壓矢量已經從U1-U5-U4-U6-U2-U3-U1旋轉了一周,并且在每個狀態的變換中,包含了U0和U7兩個狀態。結合圖2,將三相電流空間坐標定義為如圖3所示的狀態。
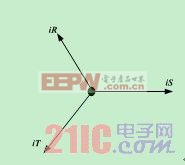
圖3 空間電流坐標
我們將U1-U5定義為Ⅰ區域,U5-U4定義為Ⅱ區域,U4-U6定義為Ⅲ區域,U6-U2定義為Ⅳ區域,U2-U3定義為Ⅴ區域,U3-U1定義為Ⅵ區域。各個區域內的電流空間矢量變化共同造就了合成磁勢的旋轉,從而形成正弦電流。其結果見圖4。
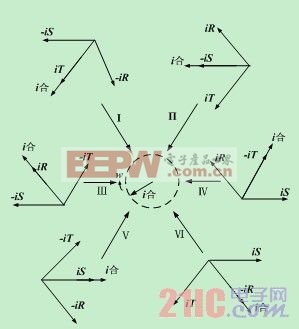
圖4 合成磁勢一周狀態
以第Ⅰ區域為例,結合三相電壓型PWM整流器來進一步描述三相橋臂的導通與電流流向狀況,如圖5所示。
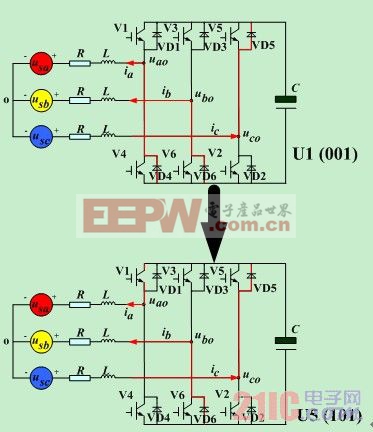
圖5 第Ⅰ區域電流變化與IGBT導通狀況
在U1狀態時,V4、V6、V5導通,此時電流ia由VD4流通,電流ib由VD6流通,電流ic由VD5流通。在狀態U2時,V1、V6、V5導通,此時電流ia由V1流通,電流ib由VD6流通,電流ic由VD5流通。其他狀態可參考相同方式進行分析。由此可見,三相PWM整流器的IGBT即使導通電流也不一定會進行流通,這是由于壓差造成的,而并聯二極管則可配合流通電流。這是三相PWM整流器IGBT工作的最大特點。
2.2控制算法原理
從三相PWM整流器的主回路驅動狀況可分析出,開關頻率很高時,由于電感的濾波作用,高次諧波電壓產生的諧波電流非常小,只考慮電流和電壓的基波,整流橋可以看作是一個理想的三相交流電壓源。適當的調節控制量的大小和相位,就能控制輸入電流的相位,以達到改變功率因數的目的,而控制輸入電流的大小以控制傳入整流器的能量,也就控制了直流側電壓,可見PWM整流器的控制目標是輸入電流和輸出電壓,而輸入電流的控制是整流器控制的關鍵。輸入電流的控制目標是使電流波形為正弦波,且與輸入電壓同相位。
三相PWM整流器的具體控制思想是通過SVPWM控制超前角,以控制功率因數的調節,在此定義超前角為α,因此,功率因數在一定范圍內可以通過α來控制。DC-BUS側直流電壓可以在一定范圍內通過調制深度M來控制。對于PWM控制電路,調制深度M和控制器角α可任意設定。其控制原理圖如圖6所示。
圖中整流器采用SVPWM控制,通過調節控制器角α和調制深度M,可以獨立控制功率因數COSφ和直流電壓Ed。圖中黃色和綠色點畫線框,分別為相位控制環和電壓控制環,只要使用相位控制環就可以使PWM整流器運行,使用直流電壓控制環可實現DC-BUS電壓恒定,從而實現過電壓狀態的能量回饋,保證電壓恒定。下面來深入分析一下相位和電壓控制過程。
(1) 相位控制
相位控制部分也可稱為功率因數控制,實質為調節功率因數的大小,保證實現電流與電壓的同相位。相位控制環通過檢測相電流iR的基波相位,經低通濾波后得相位角φ,再與指令φ*比較,并經PI調節器后用于調節PWM調制的相位控制器角α,使系統工作在任意的功率因數角下。相位檢測的精度對控制特性有很大影響,因此,要求有穩定工作的基波電流相位檢測電路。LPF的輸出信號電平決定了α的控制,一般要附加限幅電路,使α限制在±π/4之內。
脈寬調制相關文章:脈寬調制原理







評論