自行車發電及安全預警系統設計

3 自行車預警系統的工作原理
3.1 系統基本工作原理及功能
自行車預警系統是基于盛群單片機的電子控制系統,利用自行車轉動所得到的電能對蓄電池進行充電,然后用蓄電池給系統供電,系統在主芯片控制下實現自行車車速和環境溫度的測定、顯示以及超速報警,并檢測周圍的光線明暗度,自動開啟警示燈。
3.2 自行車預警系統功能的實現
HT46F49E系列單片機外部結構簡單,能耗低,集成度高,功能強。考慮到本系統的硬件結構不是很復雜,所需的單片機的接口較少,以HT46F49E單片機為控制核心是比較合適的選擇。
系統用到了該單片機的外部中斷、定時器中斷、PB口的全部引腳以及PA口和PC口的部分引腳,還使用到了單片機集成的AD轉換功能。單片機通過并口驅動液晶顯示器,完成顯示功能,并驅動開關三極管控制警示燈、照明燈和蜂鳴器;通過外部中斷獲得霍爾傳感器脈沖信號,進行速度測量;通過串口連接溫度傳感器DS18B20進行通信以獲取溫度數據;通過單片機自帶的AD轉換器對光敏電阻值進行測量,達到間接測量光線強度的目的。
4 自行車預警系統測試和結論
4.1 系統的測試條件和方法
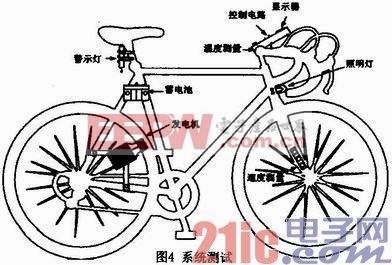
系統的測試是在一部完好的自行車上進行的,首先安裝好自行車預警系統,然后依次對各個部件進行測試,如圖4所示。測試是按照發電裝置、溫度測量、車速和行駛里程測量、光線測量、顯示以及安全預警的順序來進行的。本文引用地址:http://www.104case.com/article/175904.htm
4.2 測試結論
自行車車速測定時,由于實驗選用的自行車的車輪周長為2m,測試點設置了兩個,對于速度測定的精度只是粗略地設定為m級(測試點設置得越多,系統測得數據的精度越高)。對行駛里程的測定,因與速度有相同的誤差因素,所以測試的路程與實際路程的誤差絕對值是小于1m的。
此外,本系統的轉動發電單元、燈光控制單元、溫度測量單元和顯示單元工作正常。各項參數的誤差在允許的范圍內,由于本系統對參數的測量和電源控制不需要太高的精度,所以系統的功能是能夠滿足使用要求的。





評論