配電網(wǎng)靜止同步補(bǔ)償器直接功率控制

3 DSTATCOM DPC策略
目前,DPC有基于電壓定向控制和基于虛擬磁鏈定向控制兩種方法。兩者都是通過已設(shè)置好的開關(guān)表來選擇功率器件開關(guān)狀態(tài),區(qū)別在于定向信號(hào)的不同。基于開關(guān)表進(jìn)行控制的DPC,以PWM整流器為研究對(duì)象,主要是進(jìn)行直流側(cè)電壓穩(wěn)定控制,以控制有功為主(其無功給定為零,以實(shí)現(xiàn)單位功率因數(shù))。因此,其開關(guān)表設(shè)置不適合于作為無功補(bǔ)償?shù)腟TATCOM使用。考慮到開關(guān)頻率變化不利于系統(tǒng)設(shè)計(jì),在此采用基于電壓定向控制的DPC-SVM方法。本文引用地址:http://www.104case.com/article/175857.htm
由于采用基于電網(wǎng)電壓矢量進(jìn)行定向控制,定義d,q旋轉(zhuǎn)坐標(biāo)系的d軸與電網(wǎng)電壓三相系統(tǒng)的合成電壓矢量方向一致,由坐標(biāo)變換得電壓矢量和電流矢量示意圖如圖4所示。
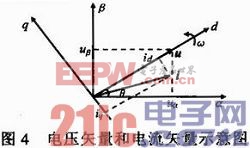
由圖4的幾何關(guān)系,可得:

直流側(cè)電壓控制采用容性感性補(bǔ)償控制,其設(shè)定值由式(7)確定:
![]()
式中:Usp為電網(wǎng)相電壓峰值;Q為DSTATCOM要補(bǔ)償?shù)臒o功容量的大小;X為連接電抗阻值;Udch為補(bǔ)償容性無功時(shí)直流側(cè)電壓給定值;Udcl為補(bǔ)償感性無功時(shí)直流側(cè)電壓給定值。
4 仿真及實(shí)驗(yàn)結(jié)果
4.1 數(shù)字仿真
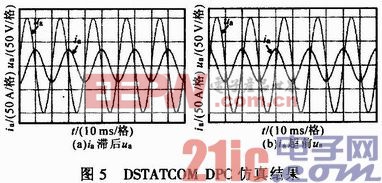
為驗(yàn)證所提出的DSTATCOM DPC方法,首先在Matlab/Simulink平臺(tái)下進(jìn)行計(jì)算機(jī)數(shù)字仿真。仿真參數(shù):電網(wǎng)相電壓100 V(最大值),電抗為1.3 mH,補(bǔ)償無功±5 kvar,開關(guān)頻率設(shè)置為10 kHz,死區(qū)時(shí)間為零。圖5a為電流ia滯后電壓ua的仿真結(jié)果,圖5b為ia超前ua的仿真結(jié)果。可見,所提方法可實(shí)現(xiàn)感性和容性無功的靈活控制。
4.2 實(shí)驗(yàn)結(jié)果
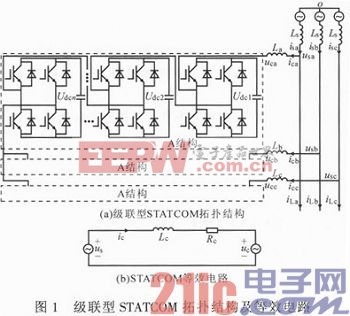
采用IPM PM300DVA120,設(shè)計(jì)了±50 kvar的DSTATCOM實(shí)驗(yàn)樣機(jī)來測(cè)試所提出的算法。控制器采用高性能TMS320F2812型DSP,DSTATCOM主要參數(shù):系統(tǒng)容量為±=50kvar;電網(wǎng)相電壓為100V;電網(wǎng)頻率為50 Hz;輸入電抗為(0.15+j0.41)Ω,1.3 mH;直流側(cè)電容為5 mF/900 V;PWM開關(guān)頻率為10 kHz;信號(hào)采樣頻率為10 kHz。
根據(jù)PM300DVA120的器件特性,設(shè)定死區(qū)時(shí)間為4μs。為便于工程接線,系統(tǒng)直接對(duì)線電壓進(jìn)行采樣。圖6為輸出±5 kvar無功時(shí)的實(shí)驗(yàn)結(jié)果。可見,基于DPC方法可實(shí)現(xiàn)電流超前電壓或滯后電壓,從而控制容性或感性無功的產(chǎn)生,對(duì)負(fù)載進(jìn)行實(shí)時(shí)無功補(bǔ)償。
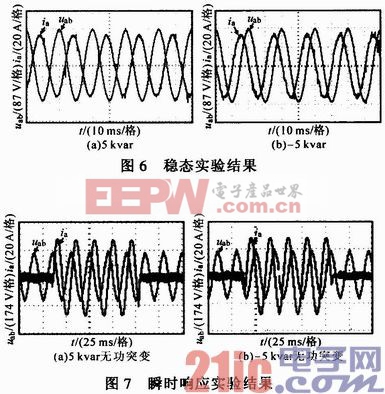
圖7示出輸出無功功率為0和±5 kvar時(shí)進(jìn)行突變的實(shí)驗(yàn)結(jié)果。由圖可見,系統(tǒng)輸出的無功功率動(dòng)態(tài)響應(yīng)僅為數(shù)毫秒,無明顯振蕩調(diào)整過
程,反映出DPC方法對(duì)DSTATCOM系統(tǒng)具有良好的動(dòng)態(tài)響應(yīng)性能。
5 結(jié)論
在此提出一種適用于配電網(wǎng)靜止同步補(bǔ)償器的直接功率控制策略,直流側(cè)電壓控制采取容性感性無功分別設(shè)置,采用空間矢量調(diào)制方法實(shí)現(xiàn)定頻控制,以解決開關(guān)頻率變化問題。所提出的控制方法簡(jiǎn)化了結(jié)構(gòu),便于用處理器實(shí)現(xiàn)。仿真和實(shí)驗(yàn)結(jié)果表明該方法的有效性。

評(píng)論