太陽磁場望遠鏡KD*P高壓脈沖電源設計

2.1 邏輯判別與輸出控制繼電器電路
主控計算機根據觀測波長和觀測內容確定控制信號,通過數字I/O卡將組合邏輯信號發送給高壓調制系統。系統中通過可編程邏輯器件(GAL 16V8),根據輸入邏輯選擇工作繼電器的接通與斷開,實現觀測內容和所需高壓的對應。
2.2 光耦隔離保護電路
由于系統中存在1 000 V的高壓成分,為了對主控計算機進行保護,邏輯控制側的TTL控制信號通過光耦控制現場側的高壓脈沖信號,形成從邏輯側到現場側的不可“逆”電路,從而保護主控計算機及其他重要的觀測設備。
2.3 數據采集與KD*P同步反轉電路設計
要實現磁場測量需要進行積分計算,而且要保證左旋光和右旋光的分別進行積分,然后才能根據Stokes公式計算獲得太陽磁場,通常情況下要實現10 G的測量精度,積分的數據幀數需要達到256幀以上。磁場計算公式經簡化后如下:
Mag=K(I+-I-)/(I++I-) (1)
式中:Mag為太陽磁場;K為望遠鏡磁場測量的定標系數;I+和I-分別表示左旋光積分值和右旋光積分值。
因此,要保證磁場測量精度就必須要要保證數據采集和KD*P高壓信號的同步。在該系統中,通過CCD自身提供的Strobe信號和數字I/O卡輸出的數據采集結束信號經由74HC74進行同步形成KD*P高壓的反轉同步信號。
3 測試結果對比
3.1 高壓脈沖波形指標對比
整個系統的要求指標為:由于矩形波存在有一定的上升時間,這個上升時間一起的波形誤差經過了KD*P調制器及濾光器作用,會引起出射光電流的畸變,這樣會影響測量視線速度的精度,以及干擾磁場信號。因此為了保證這個系統的測量精度,要求矩形波上升與下降時間在74μs之內,也就是半波的上升下降時間在37 μs之內,這相當于矩形波周期的1/100,對于電壓紋波,要求矩形波頂部不規則起伏小于幅度的1/200。原有高壓調制系統實測指標:矩形波的上升下降時間為10~12μs,僅為T/700新高壓調制系統實測指標,如圖1所示。本文引用地址:http://www.104case.com/article/175830.htm
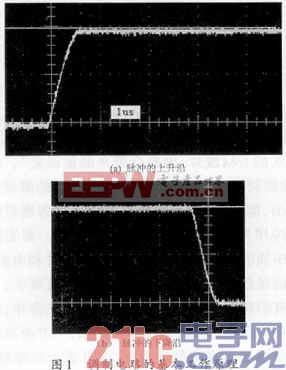
圖1為示波器測量所得輸出1 000V高壓時高壓脈沖信號的上升和下降沿,橫坐標代表時間,每一個大格表示1μs;縱坐標代表電壓幅值,一個大格代表500 V,圖中顯示的電壓幅值為1 000 V,即脈沖幅值為1 000 V時上升沿和下降沿的時間,都小于1μs。為了能夠更好地看出高壓波形的上升和下降所造成的時延,分別只抓取波形的上升沿和下降沿,比較其延遲時間,從圖中可以看出波形上升和下降沿總共的延遲小于2μs。
圖2為示波器測量所得高壓波形的紋波,為了能夠清楚的顯示紋波大小,在示波器上對波形進行放大,橫坐標代表時間,其中每大格代表400 ns(每小格80 ns);縱坐標代表電壓幅值,一個大格代表10 V(每小格2 V)。該圖表明系統輸出1 000 V的脈沖序列,上升沿開始1.6μs之后,紋波小于2 V。
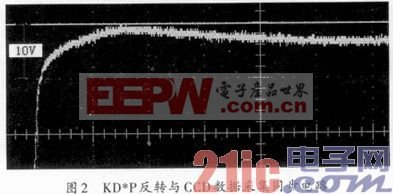
圖2可以看出除了上升沿之后的1.2μs內有4 V左右的波動之外(可能是系統中的電容效應造成),1.6μs之后平穩輸出階段的紋波幅值均小于2 V,即波動小于總幅值的1/500。從上面的實際波形測量中我們看到:高壓波形的上升下降延遲時間總和小于2μs,常規觀測周期一般為20~30μs,即:延遲時間僅相當于波形周期的1/1 500~1/1 000;電壓紋波,波形的不規則起伏小于2 V,即波動小于高壓幅度的1/500。以上指標可以看出,高壓波形精度滿足了系統的原始要求,在實際使用中也取得了良好的效果。

評論