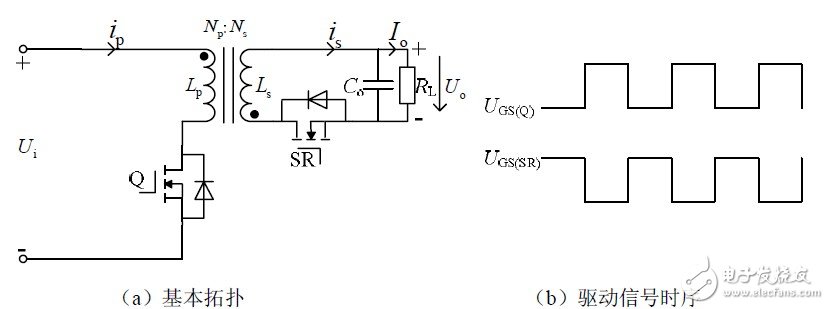
反激變換器的原邊非線性電流控制方法

1.2 反激變換器的無源性
定義系統的能量函數為:
因此根據無源性控制理論,可以判定系統是嚴格無源的。
1. 3 反激變換器原副邊電流關系
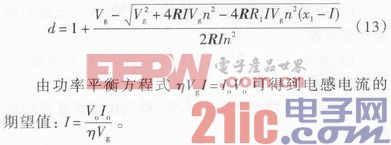
為了獲得使副邊恒流的原邊電流控制律,需要獲得原副邊電流之間的關系。由功率平衡方程式:
2 控制器設計
無源性控制的目的是控制輸入d,使系統狀態變量X能跟蹤期望值X*。控制器的設計步驟為:
(1)根據系統的歐拉-拉格朗日模型,導出系統的誤差狀態方程;
(2)對系統注入阻尼,根據Layapunov穩定性理論,得到系統的平衡點方程;
(3)根據系統的平衡點方程,得到保證系統全局漸進穩定的控制律。
設系統(3)的誤差矢量為:
為了使系統誤差能快速收斂,基于無源性控制原理,對系統注入阻尼項,使:
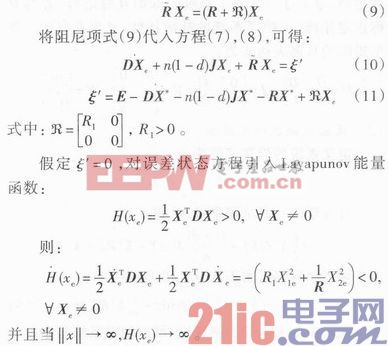
對于嚴格無源系統,由于Layapunov能量函數滿足H>0,H0,并且徑向無界。因此由Layapunov穩定性理論可以知道,誤差系統的狀態零點是全局漸進穩定的。也就是說,只要滿足ξ’=0,誤差零點就是系統的平衡點。因此求解ξ’=0的方程,就可以得到滿足系統全局漸進穩定的控制律:
由于采用直接控制反激原邊電流間接控制負載電流的方式,即使得電感電流保持恒定


評論