LED燈高功率因數驅動器的設計方案(一)

元件C1,D5,C2,D7,D6組成主要填谷電路,每個周期內交流電經由橋堆D1~D4整流后,給C1,C2串聯著充電,D6防止C2反經過C1放電,C1,C2的充滿的電荷經由D7,D5并連著放電。圖3右側是電路輸入電流的仿真結果,能觀察到每個周期的輸入線電流從30°到150°和210°和330°角度內連續變化,而150°到210°和330°到360°角度內不連續變化,大多電流的畸變都是在這些不連續的時間內發生,如果減少這些畸變,會進一步提高諧波性能。仿真圖看到每個正負周期內有一個高的電流尖峰,這也是造成電流畸變的因數之一,可以通過其它元件來抑制這個尖峰,但在大功率應用里,需要平衡好效率和發熱方面的問題。
3.2 實驗測試填谷式驅動器的功率因數
在常規的BUCK結構上增加了上面介紹的被動式填谷電路,這里的元件分別是C1,C2,D2,D3,D4和R2組成,電阻R2可以改幫助改善諧波電流,降低圖3.1仿真結果上的最大電流尖峰,實驗中主控制降壓芯片用恩智浦公司的SSL21084產品,SSL21084只是把主開關管集成到芯片內部,開關控制方式與SSL2109是完全一樣的,具體線路如圖3.2-1所示:
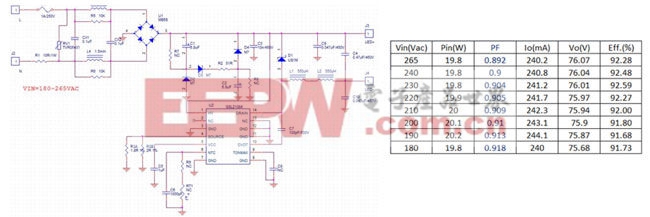
圖3.2-1:填谷式降壓結構線路和測試結果
圖3.2-1右側是20W的LED驅動器的測試結果,采用被動式填谷電路后,當輸入電壓從200V到265V內變化時,功率因數PF已經從原來的0.6提高到了0.9以上,效率也能達到92%,所以在提高功率因數的同時,效率沒有明顯的降低。圖3.2-2是輸入電壓和輸入電流的波形圖,綠色通道是輸入電壓波形,淺藍色通道是輸入電流波形,很明顯雖然功率因數提高了,但輸入電流波形還是有畸變的,所以總諧波因數不是很好,測試數據顯示總電流諧波在38%,如圖3.2-2右側諧波測試數據所示,第3,5,7,9次奇次諧波值還是非常高。

圖3.2-2:填谷降壓式結構測試波形和諧波結果
4 主動式LED驅動器
主動式功率因數校正的方式和特點
主動式功率因數校正常規上采用兩極拓撲來實現,前級用升壓電路結構,后級直流轉換部分用隔離反激式結構,如圖4.1示,功率因數校正芯片用恩智浦半導體的SSL4101控制器,它運行在臨界導通模式下,恒定導通時間控制,流過電感電流與橋堆整流后的電壓成正比例關系,所以輸入平均電流的相位會跟隨輸入電壓,得到非常高的功率因數。這種控制環路可靠度高,常在中、大功率驅動器中使用。SSL4101也集成了反激轉換控制功能,如目前常采用準諧振斷續式控制,準諧振工作的特點就是確保主開關上的寄生電容上的電壓降到最低時導通,降低開關損耗,并對電磁輻射有一定程度的幫助。副邊輸出的電壓和電流電平通過光電耦合器 (簡稱光耦)來回授反饋給原邊控制器。相比填谷式結構,主動式功率因數校正設計可以達到更高的功率因數和低的諧波電流,輸出LED電流紋波也非常低。但是這種兩級結構的驅動設計非常復雜,元件成本也很高,一般只適合在功率大于75W以上的LED驅動器中使用。

圖4:兩級主動式功率因數校正結構圖

led燈相關文章:led燈原理











評論