基于ATmega128的GPS時鐘設計與實現

關鍵詞:GPSATmega128高精度時鐘液晶顯示
1.引言
GPS(Global Positioning System)全球定位系統是利用美國的24顆GPS地球衛星所發射的信號而建立的導航、定位、授時的系統。目前,GPS系統廣泛地應用在導航、大地測量、精確授時、車輛定位及防盜等領域。
GPS授時功能是其主要功能之一。時間信號的準確與否,直接關系到人們的日常生活、工業生產和社會發展。GPS時鐘為滿足精密定位和導航的需要,在系統設計與實驗之初就建立了自己專用的時間系統,該系統簡寫為GPST,它由GPS主控站的高精度原子鐘守時和授時。由于計算機技術、網絡技術、通信技術、GPS定位技術等相關技術的發展,以及GPS OEM板價格的降低,GPS時鐘已經具備了為各個應用領域提供高精度授時的可能性。
本文旨在通過利用GPS所提供的精確授時功能,采用單片機技術,設計適合于需要精確授時的高精度時鐘系統,并通過LCD進行顯示。
2.GPS授時原理
GPS時間系統是由GPS系統定義和使用的時間系統。衛星定位系統以時間為基本觀測量,由于衛星高速飛行,因此要求時間系統必須十分精確,否則就會帶來很大的距離誤差。GPS時間系統以原子頻率標準作為時間基準,以1980年1月6日0時作為起點。它不存在跳秒,它的時間與協調時秒以下的差異可以保持在100微妙內,并定期公布誤差,在星歷文件中發布的衛星鐘差就是相對GPS時間系統的鐘差。
GPS 授時的基本原理是: 衛星不間斷地發送自身的星歷參數和時間信息, 用戶接收到這些信息后,經過計算求出接收機的三維位置、三維方向以及運動速度和時間信息。這里只需要 GPS 授時系統的時間信息。若設(x,y,z)為接收機的位置, (xn,yn,zn)為已知衛星的位置, 則解下列方程就可以得 x,y,z到和標準時間 T:
(x-x1)2+(y-y1)2+ (z-z1)2 =C2(T+ T-T1 - 1)
(x-x2)2+(y-y2)2+ (z-z2)2 =C2(T+ T-T2 - 2)
(x-x3)2+(y-y3)2+ (z-z3)2 =C2(T+ T-T3 - 3)
(x-x4)2+(y-y4)2+ (z-z4)2 =C2(T+ T-T4 - 4)
其中△T為用戶時鐘與 GPS主鐘標準時間的時差;Tn 為衛星 n 所發射信號的發射時間; 為衛星 n 上的原子鐘與GPS主鐘標準時間的時差[1]。
3.本系統構成及硬件軟件實現
3.1 本設計采用GPS板介紹
本設計采用THALES-NACIGATION公司生產的A12 GPSOEM接收板,它采用了先進半導體設計手段,具有尺寸小、功耗低、性能穩定、性價比高等優良特性。利用它可以方便、快速地開發出各種GPS應用系統。其主要性能指標如下:
接收通道――12通道并行接收,可同時跟蹤12顆衛星;
授時精度――小于400ns,無累計誤差;
數據更新時間――1s;
體積和重量――39mm60mm10mm,約重40g;
數據輸出格式――NMEA-0183 v2.0;RTCM-sc104 v2.0;
環境工作溫度――-30℃~+80℃;
正常工作參數――電壓5(10.05)V;電流70mA。

圖1 GPSOEM板A12
GPSOEM板提供硬件接口如表1所示:
管腳 | 信號類型 | 功能 |
1 | VCC | 電源 |
2 | V_ANT | 天線電源接口 |
3 | V_BACK | 備用電源 |
4 | GND | 地 |
5 | RTCM | 接收信號口B |
6 | RXD | 接收信號口A |
7 | TXD | 發送信號接口A |
8 | 1PPS | 1個脈沖輸出/秒 |
表 1 GPS輸出接口定義
其輸出數據邏輯電平為 TTL 電平,這樣能夠很方便地與單片機相連。格式位默認為:波特率4800,8個數據位,1個停止位,無奇偶校驗位。GPS輸出數據采用NME-0813格式輸出,數據代碼采用ASCII碼字符,本設計采用NME-0813中RMC格式,下面是GPS輸出的一組數據:$GPRMC,140736.00,A,3800.9040,N,11226.5364,E,00.0,355.6,121106,04,W,D*3B,其中140736.00代表14時07分36.00秒,121106代表06年11月12日,根據系統需要,我們需要提取這個數據。GPS所得時間為格林尼治時間(零時區),要得到北京時間(東八區)一定要將提取到的世界時加上 8 h 才是北京時間。
3.2 系統組成及其實現
系統選用ATmega128單片機,它有豐富的外部資源,利用它的USART1與GPS接收機通信:
其總體硬件連接如圖2所示。

圖2 GPS時鐘實現的結構
液晶顯示器采用含控制器S1D15G14的3510i彩色液晶顯示,S1D15G14附帶有LCD電源驅動電路的LCD驅動器,可在單片上實現彩色顯示,能顯示4096色,分辨率是98x67。它與單片機ATmega128采用串口連接。
主程序提取GPS數據采用查詢方式[2],
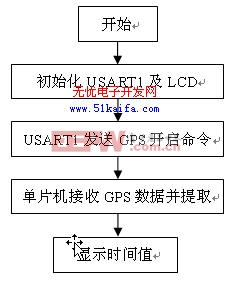
圖3 程序流程圖
GPS時鐘在ATmega128上軟件實現[3] (其中LCD函數為顯示函數):
if(USART1_Receive() == '$') // USART1_Receive()為串口接收函數
{ while((gps_data_buff[counter ++] = USART1_Receive()) != '*');
data = 1; j = 0; i = 0 ; //接收數據放入gps_data_buff[ ]數組當中
for (i=0;i69;i++)
{if(gps_data_buff[i] == ',')
{ data ++ ; j = 0;
}
switch(data)
{ case 1: break;
case 2: time[j ++] = gps_data_buff[i + 1];time[j] = ' 主站蜘蛛池模板: 和林格尔县| 易门县| 沂南县| 苍溪县| 泉州市| 蒙阴县| 慈溪市| 江孜县| 华坪县| 密山市| 咸宁市| 衡山县| 烟台市| 镇远县| 会同县| 芦山县| 泗水县| 静安区| 和静县| 陆丰市| 大庆市| 永昌县| 永寿县| 信阳市| 阿拉善盟| 加查县| 乐平市| 正宁县| 鹰潭市| 蒲江县| 宜城市| 连南| 宁波市| 长武县| 民和| 乌兰察布市| 乌拉特后旗| 澳门| 大埔区| 芦溪县| 贺州市|