一種基于單片機的燈光調光控制系統開發

4、人機接口模塊。人機接口模塊主要完成按鍵和顯示功能。通過按鍵可以設定光級,用戶可在5級光中任意選擇。同時,系統將顯示主回路變壓器二次側的電流、電壓值。
該模塊的功能主要是由芯片8279完成的。Intel 8279是一種通用可編程鍵盤、顯示器接口芯片,它能完成鍵盤輸入和顯示控制兩種功能。鍵盤部分提供一種掃描工作方式,可與64個按鍵的矩陣鍵盤連接,能對鍵盤不斷掃描,自動消抖,自動識別出按下的鍵并給出編碼,能對雙鍵和n鍵同時按下實施保護。顯示部分為發光二級管、熒光管及其它顯示器提供了按掃描方式工作的顯示接口,它為顯示器提供多路復用信號,可顯示16位的數字或字符。
5、驅動模塊設計。驅動模塊的設計主要是針對IPM的。該設計完成對IPM門極的驅動,以及對它的一些保護、去干擾措施。
3 控制系統軟件設計
3.1 系統程序流程及抗干擾設計
圖5 程序流程圖
控制系統的軟件采用中斷處理和查詢并用的方式。主程序完成循環查詢按鍵、報警信號、A/D狀態;中斷處理程序分為三部分。首先,由于傳感器采回來的信號有很多干擾信號存在,所以在系統軟件設計時利用A/D多次采樣值取平均值的方法消除干擾,第一部分的中斷程序用來實現此功能。其次,根據SPWM信號產生的機制,第二部分中斷程序完成必要的計算以產生所需值,再次,第三部分的中斷程序能對來自IPM模塊的報警信號做出響應,并
采取相應控制措施。程序的流程如圖5所示。
系統軟件設計產生PWM波形以正弦波為載波頻率構成SPWM信號。系統采用C196進行編程,相對于匯編語言來說利用高級C語言使得編程簡便、直觀,調試也比較方便,提高了工作效率。編程過程中,首先要對一些參數初始化,以啟動波形發生器。
竄入測控系統中的干擾,其頻譜往往很寬,且有隨機性,采用硬件抗干預措施,只能抑制某個頻段的干擾,仍有一些干擾會侵入系統。需要采取軟件抗干擾措施。軟件抗干擾技術是當系統受干擾后使系統恢復正常運行或輸入信號受干擾后去偽求真的一種輔助方法。由于軟件設計靈活,節省硬件資源,所以軟件抗干擾技術越來越引起人們的重視。疊加在系統被測模擬輸入信號上的噪聲干擾,導致較大的測量誤差。但由于這些噪聲的隨機性,可以通過軟件濾波(即數字濾波技術)剔除虛假信號,求其真值。系統采用了防脈沖干擾平均值濾波法、一階滯后濾波法作為軟件抗干擾措施。
3.2 系統控制算法設計
系統軟件采用的是增量式分段PID控制器,分段式是指PID控制器在不同的區間采用不同的參數。增量式PID數字控制器差分方程為:
 本文引用地址:http://www.104case.com/article/173817.htm
本文引用地址:http://www.104case.com/article/173817.htm式中,kp, kd, ki,分別是比例、微分、積分參數,e (k)為時刻k的偏差,e (k-1)和e (k-2)分別是k-1及k-2時刻的偏差。u (k)為時刻k的輸出值,u (k-1)為k-1時刻的輸出值。kp, kd, ki經過現場調試整定為kp=2.5~4.5, kd=0~40, ki=0~0.05。根據設計,系統采用的是分段式PID,即e (k)較大時,kp, kd兩個參數起作用,當e (k)小到一定范圍內時kp, kd, ki三個參數共同作用。這就使得系統可以快速穩定的達到穩態值。系統設計時在控制算法后加上一個輸出緩沖環節,通過它來調節輸出的步長,一方面可以控制變化速度,另一方面通過輸出的緩沖影響了 PID使系統快速達到穩定。程序實現中利用ram_k_step變量控制輸出的步長,根據情況加減ram_k_step值。mark_wg是輸出環節狀態標志。
4 系統通訊功能設計
現代的控制系統不僅僅是單機系統,往往還增加了網絡功能以便信息的集中管理。系統設計中采用的是控制局域網絡CAN,利用該網絡可把現場的數據及時送到上位機,實現系統監控、管理,同時上位機也通過總線系統發出指令。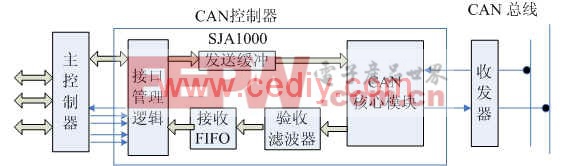
圖5 CAN總線框圖
CAN總線主要由CAN控制器和CAN總線收發接口電路組成。CAN控制器主要由CAN總線協議部分和與微控制器接口部分電路組成。CAN總線收發接口是CAN控制器與物理總線之間的接口。CAN總線的框圖如圖6所示。系統設計時CAN控制器選用的是SJA1000 (Philips公司生產),CAN總線收發接口采用的是82C250。系統設計時使CAN系統實現冗余的工作模式即采用了兩個CAN控制器,形成兩路CAN總線。系統運行時可保證至少有一路CAN總線工作,以保證系統的可靠性。CAN總線軟件部分設計主要是采用中斷處理方式,每當檢測到CAN控制器產生中斷,主控制器立即讀取CAN控制器內部中斷寄存器,判斷是何種中斷并作相應的處理。采用這種處理方式使編程比較簡單.,有利于程序的規劃。采用高級語言C進行編程使程序非常直觀,有利于系統的調試,加快了開發周期,提高了工作效率。
CAN總線軟件設計采用中斷處理方式,通過CAN控制芯片內部中斷寄存器判斷是何中斷,并進入相應的處理程序。要使CAN控制芯片工作首先必須對它初始化。
5 本文作者創新點
本文研究的對象是機場燈光調光器控制系統,設計出一種新型機場燈光調光器控制系統。它具有負載適應能力強、對電網要求低、污染輕、效率高、輸出波形好等優點。采用先進的智能功率模塊(IPM)取代以往的可控硅作為功率變換器件。本文研制的調光器采用逆變技術,輸出標準正弦電壓,通過控制算法實現對燈光回路的高精度恒流控制。最后,調光器加入了通訊接口的設計,使系統具有網絡功能,以便信息的集中管理。現場總線CAN的運用實現了數據的現場傳輸,一種冗余的CAN系統進一步保證了傳輸的可靠性。











評論