CAN總線遠程傳輸可靠性的設計方法和實現

 本文引用地址:http://www.104case.com/article/173745.htm
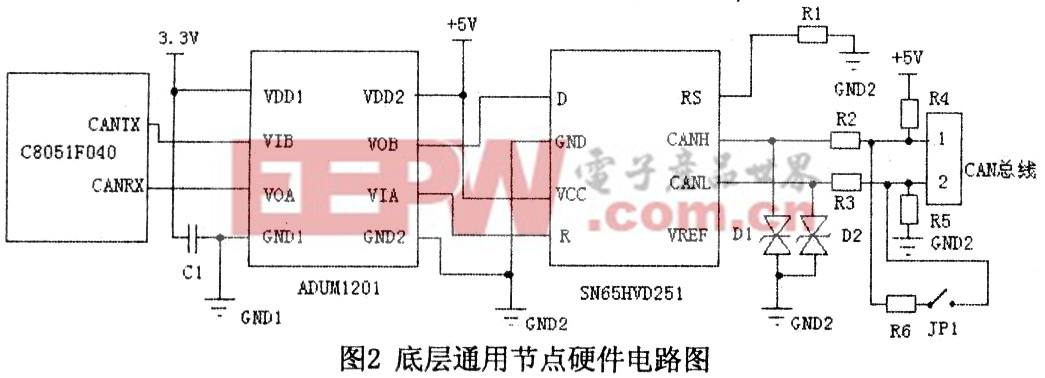
本文引用地址:http://www.104case.com/article/173745.htmCAN收發器SN65HVD251在CANH和CANL輸出引腳間并聯一個電阻,作為CAN總線的終端電阻,在本節點作CAN總線終端節點時,閉合跳線片JPl,使終端電阻工作。終端電阻值R6等于傳輸電纜的特性阻抗,一般取值120Ω在文獻中有詳細的討論,解決了遠近端阻抗不匹配的影響。SN65HVD25l的Rs引腳為斜率電阻輸入引腳,可以改變收發器工作的方式。在CANH和CANL上各自串聯電阻R2、R3限流,再通過一組上下拉電阻R4、R5,有效抑制反射波干擾,保持總線處于高阻態時,接收端收到的始終是“l”電平,這樣拉高信號的幅度,減少誤碼率。另外在CANH年NCANL之間并聯一對方向相反的瞬態二極管Dl、D2,可防雷擊,以及防止其他總線上的瞬變干擾。
3 整體系統設計
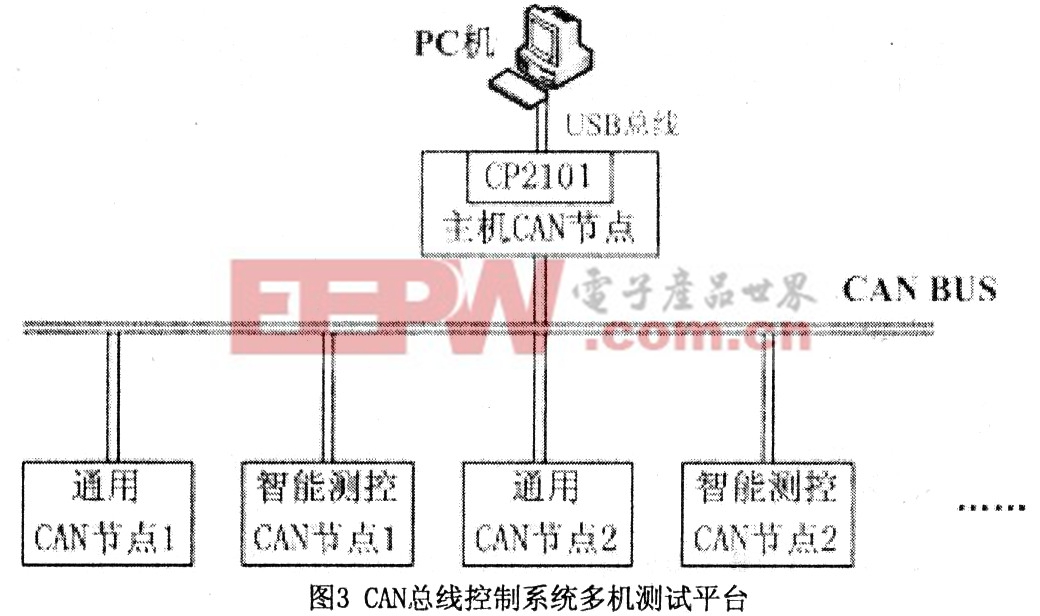
依據以上器件組建一個可靠的CAN總線遠程控制系統網絡平臺。本系統由一個主機CAN節點通過USB接口與上位PC機相連,主節點采用總線方式與下面各個功能節點連接,如圖3所示,其中主機CAN節點主要用來發送遠程控制廣播命令,收集所有節點傳來的數據,并上傳給上位機軟件進行識別分類和統計,它實現了總線偵聽、網絡監控和上位機接口功能。而底層節點則控制系統中的底層設備,發送包含節點信息的8字節數據CAN總線報文,并偵聽主機節點的網絡廣播指令,調整節點功能。
圖3 CAN總線控制系統多機測試平臺
4 實驗分析
4.1 不同公里數通訊結果分析
將系統總線與模擬的1公里一5公里遠程網絡相連。為了更好分析CAN總線可靠性,使示波器更好的觀察報文波形。將示波器CHl兩端與距主節點0公里處相連,CH2兩端與距主節點5公里處相連,如圖4所示。這樣,可以觀察到相對主機CAN節點5公里通訊的近端(CHl)和遠端(CH2)的通訊報文波形。
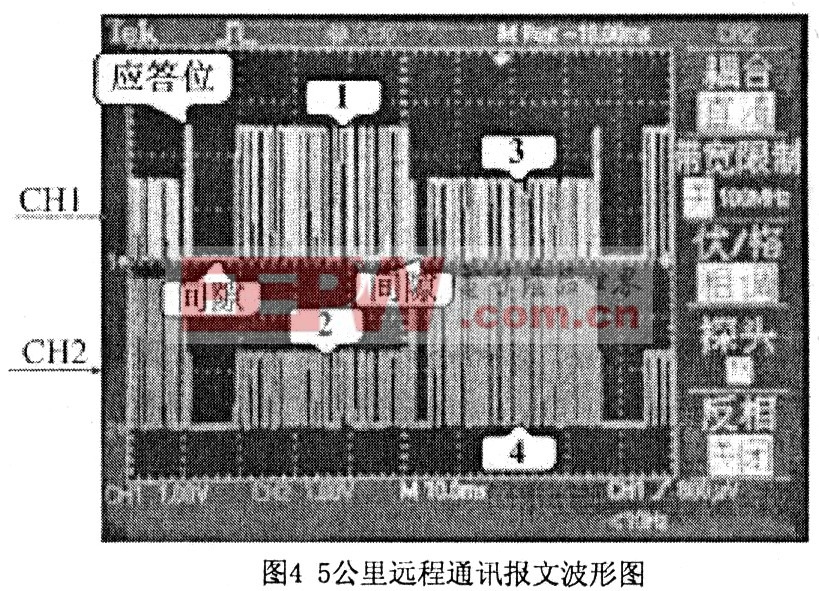
CHl測試出來的波形位于上端,CH2測試的波形位于下端。CHl端標識為1的一段波形是主節點發出的報文,2是位于CH2端底層節點接收到的報文,4是底層節點發出的數據報文,3是主機CAN節點接收到的數據,稱1和2、3和4為一組報文。每幀數據的最后一位是應答位。每兩幀報文之間有時間間隙,其中一段是主機CAN節點和上位PC機處理數據的時間,另外一段是底層測量節點處理數據的時間。
經過觀察,近端發送的1報文經過5公里距離到遠端接收到的2報文的幅值發生了衰減;同樣近端收到的3報文也在遠端4報文的幅值基礎上發生衰減。分別測試1公里到4公里通訊的波形圖,可以發現通訊距離越長,幅值衰減得越多。
在其他條件不變的情況下,分別對1公里一5公里做實驗,發現遠程通訊距離的變化會對報文傳輸速率有影響但很小,將得出的數據制表如表1。












評論