基于TMS320F2812的雙通道高精度伺服系統

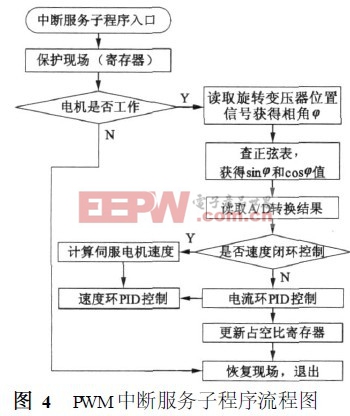
在PWM中斷服務子程序中,實時讀取RDC電路的輸出信號,作為SVPWM控制算法的角度依據; RDC電路的輸出信號與電機轉子位置信息相對應,可計算出伺服系統的轉速和位置信號,并根據A /D采樣獲得的電流信號,計算實時誤差,實現系統閉環控制,產生新的PWM占空比,通過調節占空比,控制作為伺服驅動單元的無刷直流電動機的轉速,達到實現伺服系統高精度控制的目的。
4 實驗結果與結論
伺服系統采用的兩臺無刷直流電動機實驗樣機主要參數為:額定功率80W,額定電壓28 V,最高轉速1 500 r/min,極對數p = 2,相電阻R = 0. 42Ω,相電感L = 2. 1 mH。系統工作時的PWM斬波頻率為25 kHz, SVPWM采用雙極性調制技術。
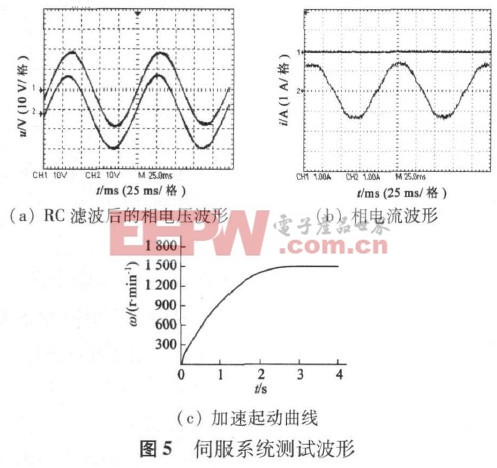
圖5a是左右通道經過RC濾波后的一相電壓波形,圖5b是單臺伺服電機工作時的相電流波形,圖5c是伺服系統的起動加速曲線。采用軟起動方式初始加速時間稍長,但對伺服系統具有一定的保護功能;并且系統采用了軟起動技術,使得在加速階段轉速超調幾乎為零,保證了系統的精度。系統運行在最高轉速時,在10 min內測量到的最大角度誤差為1. 87°,而最大轉速偏差為±1. 0%。由于采用了高精度的旋轉變壓器作為檢測元件,伺服系統的最低轉速低至0. 1r /min,滿足了低速場合的要求。實驗結果表明,利用TMS320F2812同時控制兩臺伺服電機,利用合理的控制算法和高精度傳感器,能夠獲得較高的控制精度,滿足設計目標的要求。

伺服電機相關文章:伺服電機工作原理






評論