基于PIC18F2580的CAN總線超聲波測距智能節點設計

1 引言
移動機器人要實現在不確定環境下運行,必須具備自動導航和避障功能。在移動機器人的導航系統中,傳感器起著舉足輕重的作用。視覺、激光、紅外、超聲傳感器等都在實際系統中得到了廣泛的應用。其中,超聲波傳感器以其信息處理簡單、速度快和價格低,被廣泛用作移動機器人的測距傳感器,以實現避障、定位、環境建模和導航等功能。本文介紹的CAN總線智能節點的設計以Microchip公司的PIC18F2580控制核心。由于PIC18F2580有片上自帶的CAN控制器并且為CAN的應用提供了許多專用的硬件功能,因此又將它作為了系統的CAN總線控制器,大大節省了主控系統的資源。CAN總線的收發器采用TJAl040。系統總體結構框圖如圖1所示。
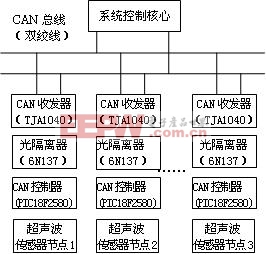
圖1 系統總體結構框圖
機器人系統控制核心由ARM或DSP實現。其主要功能是處理需要復雜計算的信息,將經過處理的信息再送回CAN總線,并對整個網絡進行管理。超聲波智能節點控制系統的主要功能就是判斷障礙物位置,將對移動機器人前進方向有阻礙的障礙物信息通過CAN總線傳回主控系統,由主控系統作出相應處理并進行避障動作。本文將著重介紹超聲波智能節點控制系統。
2 超聲測距原理
超聲測距的原理較簡單,一般采用渡越時間法,即:
D=ct/2 (1)
其中D為移動機器人與被測障礙物之間的距離,c為聲波在介質中的傳輸速率。聲波在空氣中傳輸速率為:
c= co (2)
(2)
其中,T為絕對溫度,co =331.4m/s。在不要求測距精度很高的情況下,一般可以認為c為常數。渡越時間法主要是測量超聲發射到超聲返回的時間間隔t,即“渡越時間”,然后根據式(1)計算距離。
3 超聲波智能節點控制系統的硬件設計
超聲波智能節點控制系統的硬件電路如圖2所示。
3.1 控制電路
超聲波傳感器的控制部分采用Microchip公司生產的PIC18F2580。它是一個單片8位高性能微控制器,采用了哈佛總線結構,運行速度高,功耗低,抗干擾能力強,具有片內CAN控制器。
作為系統控制核心,PIC18F2580擔負兩個主要任務。其一是作為超聲波傳感器的控制核心,在其普通I/O口上擴展了超聲波傳感器的接收和發射部分電路,利用單片機軟件功能產生40 kHz信號并通過驅動放大發射出去,再利用接收部分電路進行接收。另外可以對其余口線繼續進行超聲波傳感器的擴展,實現多個超聲波傳感器系統的設計。其二是利用PIC18F2580的片內CAN控制器實現與CAN總線的連接。這樣的設計改變了過去在機器人控制核心上進行超聲波測距系統的設計,不但將超聲波檢測與處理的工作轉移到了單片機上,大大節省了機器人控制核心的系統資源,還將CAN總線智能節點的大部分控制工作也轉移到了單片機上,節省了硬件資源,同時CAN總線的采用大大提升了系統的抗干擾能力,使機器人控制系統更加穩定地工作。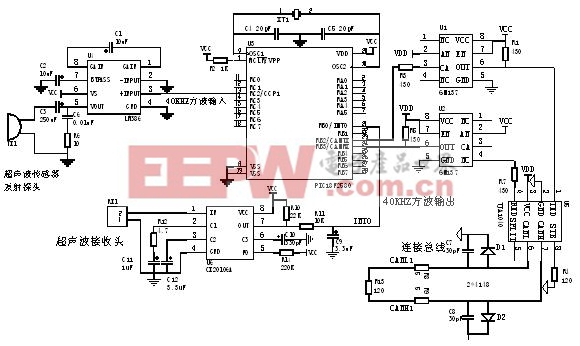
圖2 測距節點控制電路圖












評論